FlameBot
- Ett projektarbete i kursen Digitala projekt (EITF40) av Johan Linĺker och Per Gifvars -
Projektsida | Rapport | Källkod
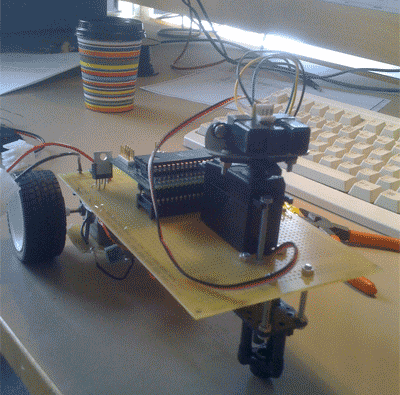
Projektet har gĺtt ut pĺ att utifrĺn begränsade kunskaper inom omrĺdet konstruera en prototyp med tillhörande dokumentation. Författarna valde att konstruera den robot som ĺskĺdliggörs i bilderna.
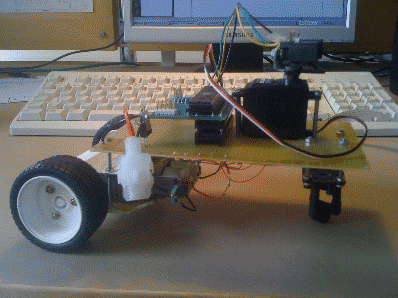
Roboten startas med hjälp av en switsch som är belägen i den bakre delen. Motorerna startar och börjar driva hjulen framĺt. Servot roterar ir-sensorn i ett 90-gradigt intervall med start frĺn höger. När sensorn uppfattar att avstĺndet i robotens aktuella riktning är mindre än 0,5 meter kommer roboten att svänga 45 grader ĺt höger eller vänster beroende pĺ vilket hĺll som har störst avstĺnd uppmätt.