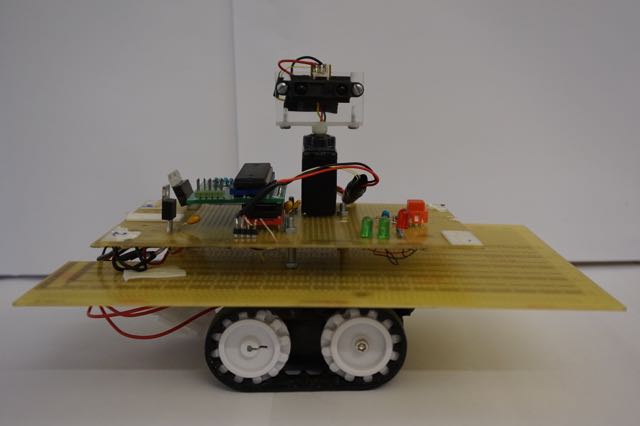
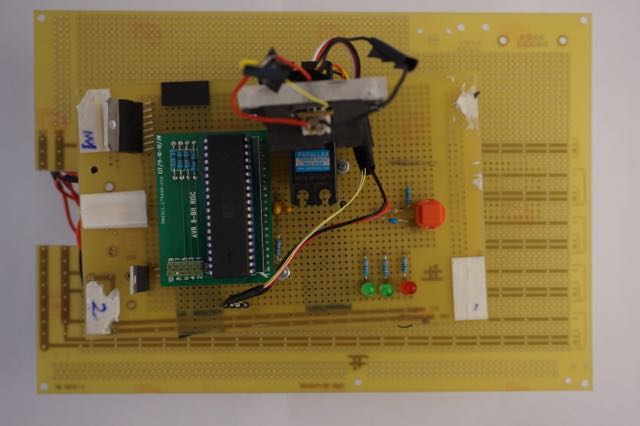
This project is about a model car with an autonomous parking system programmed in an ATMEGA16 micro controller. The robot is driven by electric motors turning two rubber-chains. It is also equipped with a distance-sensor, several status LEDs and one button to start and stop the self-parking process.
After placing the robot close to a wall which represents the parking cars press the red button. The robot will now drive parallel to the wall and search for a vacant spot. It will measure the spot and start parking if it is big enough, otherwise it will continue searching.
A 6V battery is used as a power supply for the motors and together with a 5V DC voltage regulator for all other electronic components. The motors are controlled by a PWM-signal from the ATMEGA16 connected to a H-bridge. The distance-sensor takes one measurement every 40ms. The measurement-value is given as an analog signal up to 5V representing a distance between 10cm and 50cm. To do measurements in the front, on one side and in the back of the car, the distance-sensor is mounted on a servo-motor with a range of 180°. It is directly controlled by a PWM-signal from the micro computer.
Johan Polack, Stefan Durstberger
Spring Semester 2016
Faculty of Engineering LTH, Lund University