Robert - The Line Follower
This project was a part of a course called "Digital Projects" at LTH, Sweden. The idea of this course was basically to let us come up with a viable idea of a gadget, that's controlled by a micro processor, and then carry through the idea into a working prototype. Even though the scope of the course outmatched us two economics engineers' knowledge of electronics and C programming, we managed to, within a limited period of time, grasp the areas of importance and bring out all our ideas and onto our gadget.
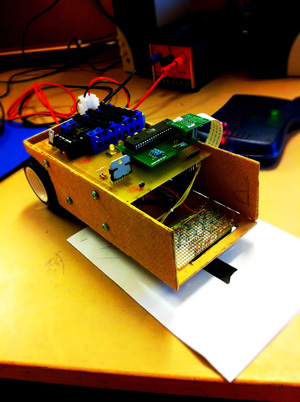
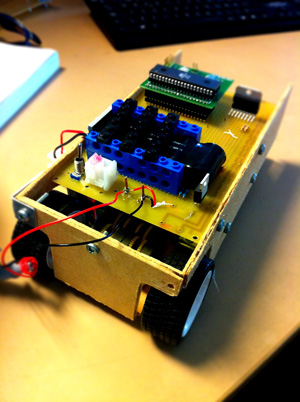
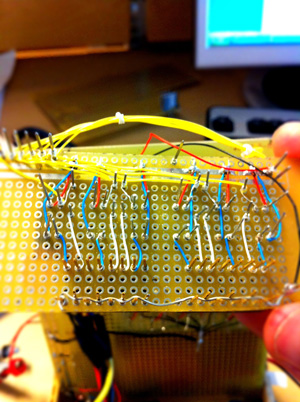
Our gadget is a line following robot. It is run by a 6V battery and can follow dark lines with a maximum of 1,5cm on a light, non-reflective surface. This is made possible by five IR emitting diodes and five IR sensitive phototransistors. These phototransistors are connected to an ATMega16 micro processor, which in turn converts the analog signals into usable 8-bit digital signals. Depending on how much IR light that is back-reflected to each of the five sensors, this microprocessor is programmed to determine where a line is positioned underneath the sensors and then to steer the robot accordingly. The robot was programmed in C through AVR Studio 4 and an accompanying JTAG device.
Special thanks to our instructor Bertil Lindvall, who dedicated more time to his students than anyone could ask for.