MegaMojt
Martin Holmstrand <et08mh5:esek.lth.se>,
Fredrik Ahlberg <et09fa8:esek.lth.se>
Målet med detta projekt var att bygga ny styrelektronik till en av Edekvatas
godismojter. Den gamla mojten har krånglat ofta och i flera omgångar lagats och uppgraderats.
En del av problemen som har funnits med nuvarande mojter är att kontakter och dylikt går sönder eller fastnar. Därför var ett av målen att minimera antalet utsatta mekaniska komponenter såsom kontakter och reläer.
För att göra det enklare för nästkommande generationer E-teknologer
att underhålla och vidareutveckla mojterna skulle systemet i delas upp i
olika noder med egen hård- och mjukvara.
Ytterligare ett designmål var att konstruera mjuk- och hårdvara så den
lätt kan anpassas till andra mojter i Edekvata.
kravspecifikation
- Ett modulärt system med noder som har dedikerade uppgifter.
- Kommunikation mellan noderna med hjälp av en störningstålig fältbuss och däri ett väldefinerat och utbyggbart protokoll.
- Färre rörliga delar.
- Intelligent felhantering och -rapportering.
- Lätt att anpassa hård- och mjukvara till andra mojter.
- Möjlighet att ansluta mojten till internet.
- Möjlighet att använda RFID-kort i ett alternativt betalsystem.
implementation
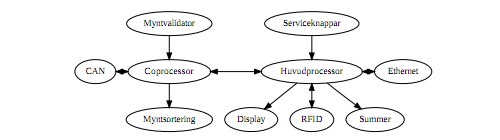
Systemet realiserades med ett antal CAN-buss-anslutna Cortex-M3-processorer från Texas Instruments. Dessa organiserades i tre noder: en myntacceptor, en dörrnod samt en motornod. Myntacceptorn innefattar två processorer där den ena står för mojtens centrala styrning (se figur). Dörrnoden avläser produktvalsknapparna på mojtens framsida. Motornoden styr högspänningen till de motorer och solenoider som sköter varuutmatningen.
slutsats
Den implementation som vi har valt att genomföra har visat sig fungera
bra. Kompexiteten hos hårdvaran hade den nackdelen att det tog längre
tid än väntat att kunna börja testa och programmera. När väl hårdvaran
och tid fanns så gick arbetet snabbt framåt.
Beslutet att använda sig av separata noder gjorde att mycket av grundarbetet kunde utföras individuellt vilket har underlättat utvecklingen. Den
extra komplexitet som CAN-bussen lade till visade sig i slutändan hjälpa
till väldigt mycket.
Implementationen gör även att det är relativt enkelt att lägga till ny
funktionalitet till mojten.
Rapport (pdf, 3 MB)
/ Kongo & Smulan, 2011