Idé
Planen med projektet Arne var att under två läsperioder i Digitala projekt Större kurs (EDI022) bygga en robot med förmågan att förflytta sig i ett okänt område, samt rapportera data om omkringliggande objekts position till en dator. Mätdatan kan sedan analyseras för att generera kartor över området.
Konstruktion
Vi byggde systemet kring tre enheter:
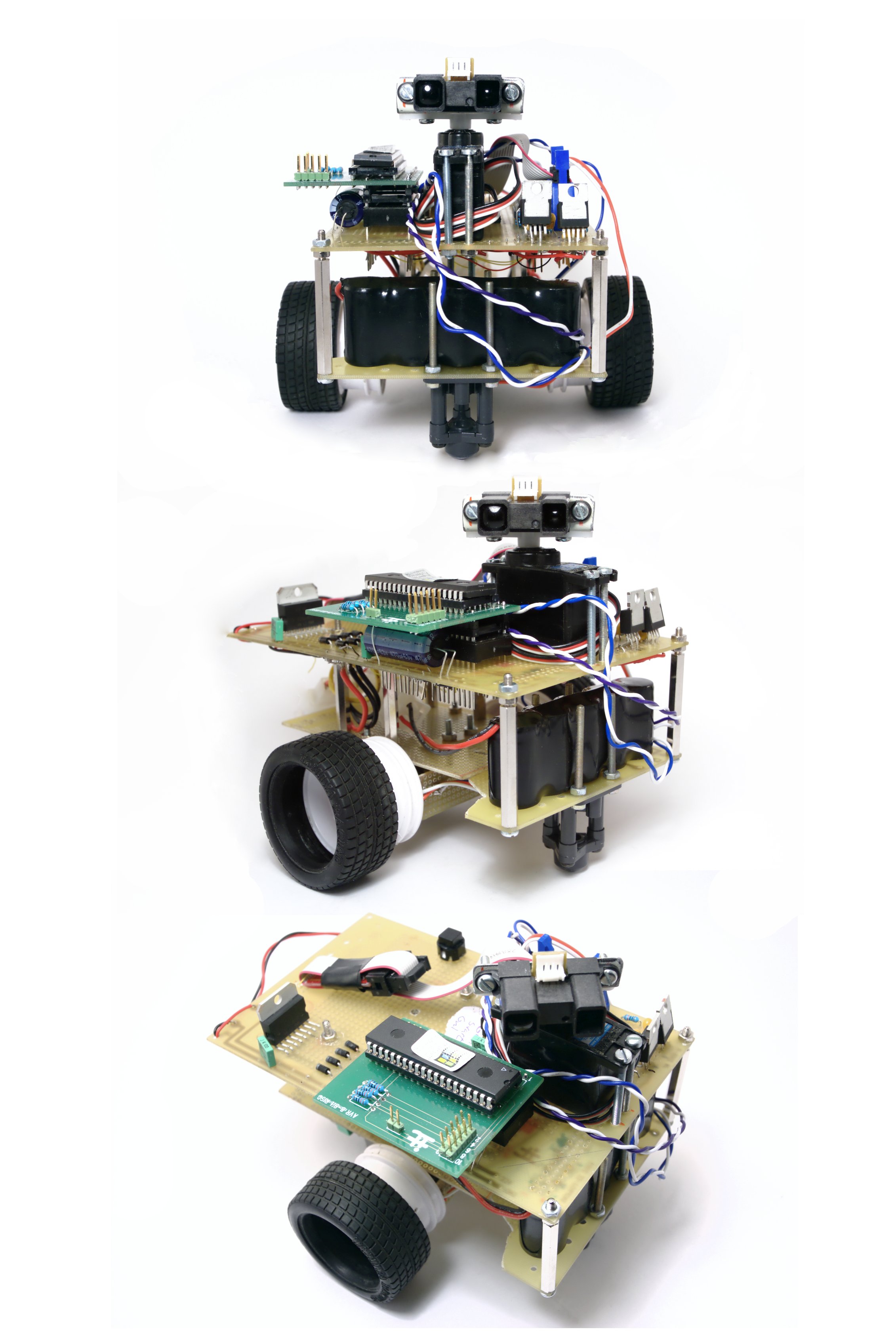
Roboten är baserad på en Atmega16 mikrokontroller och har bl.a. en avståndsensor för hinderdetektering och en radiomodul för kommunikation med omvärlden.
Bryggan är baserad på en likadan mikrokontroller och har också en radiomodul, samt en MAX232 TTL<->RS232 spänningsomvandlare för att kunna kommunicera med datorn.
Datorn står för databehandlingen och kontrollen av roboten vilket sköts via MATLAB.
Resultat
Rapport (pdf, 2312k)
Källkod (tar.gz, 20k)
Bilden längst upp på sidan visar den färdiga roboten och nedan finns mätdata från samt en video som spelades in under en provrunda
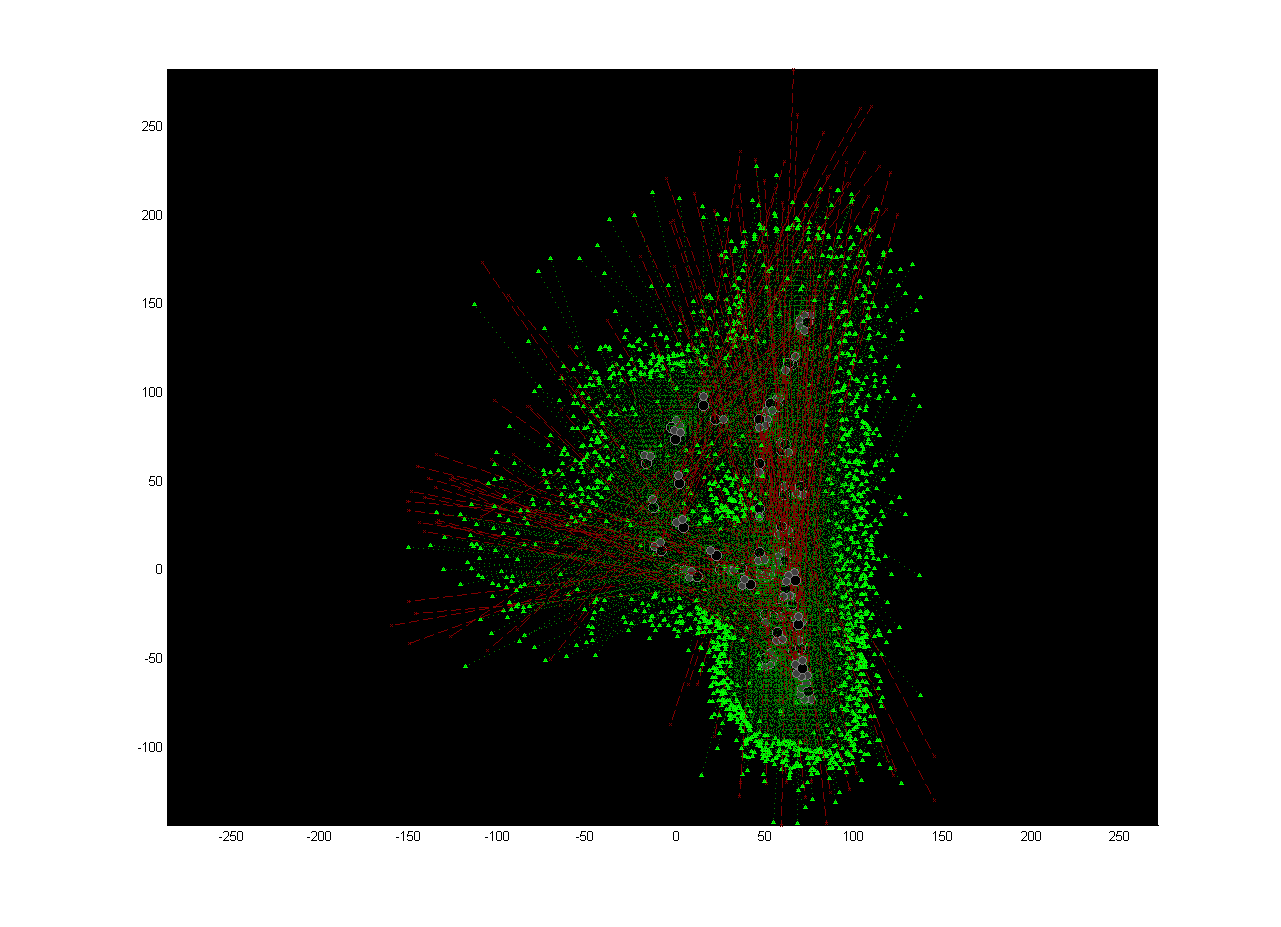
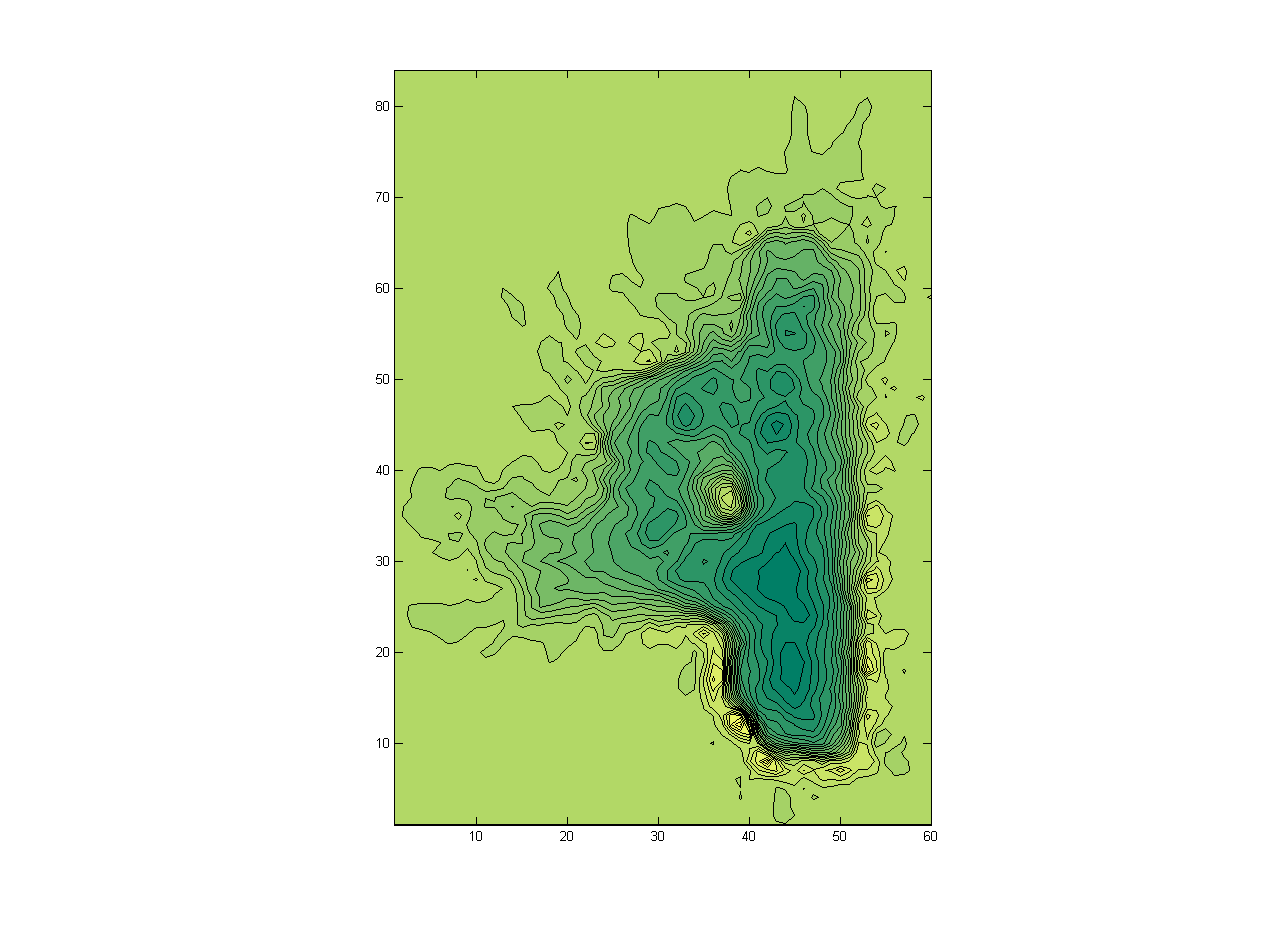
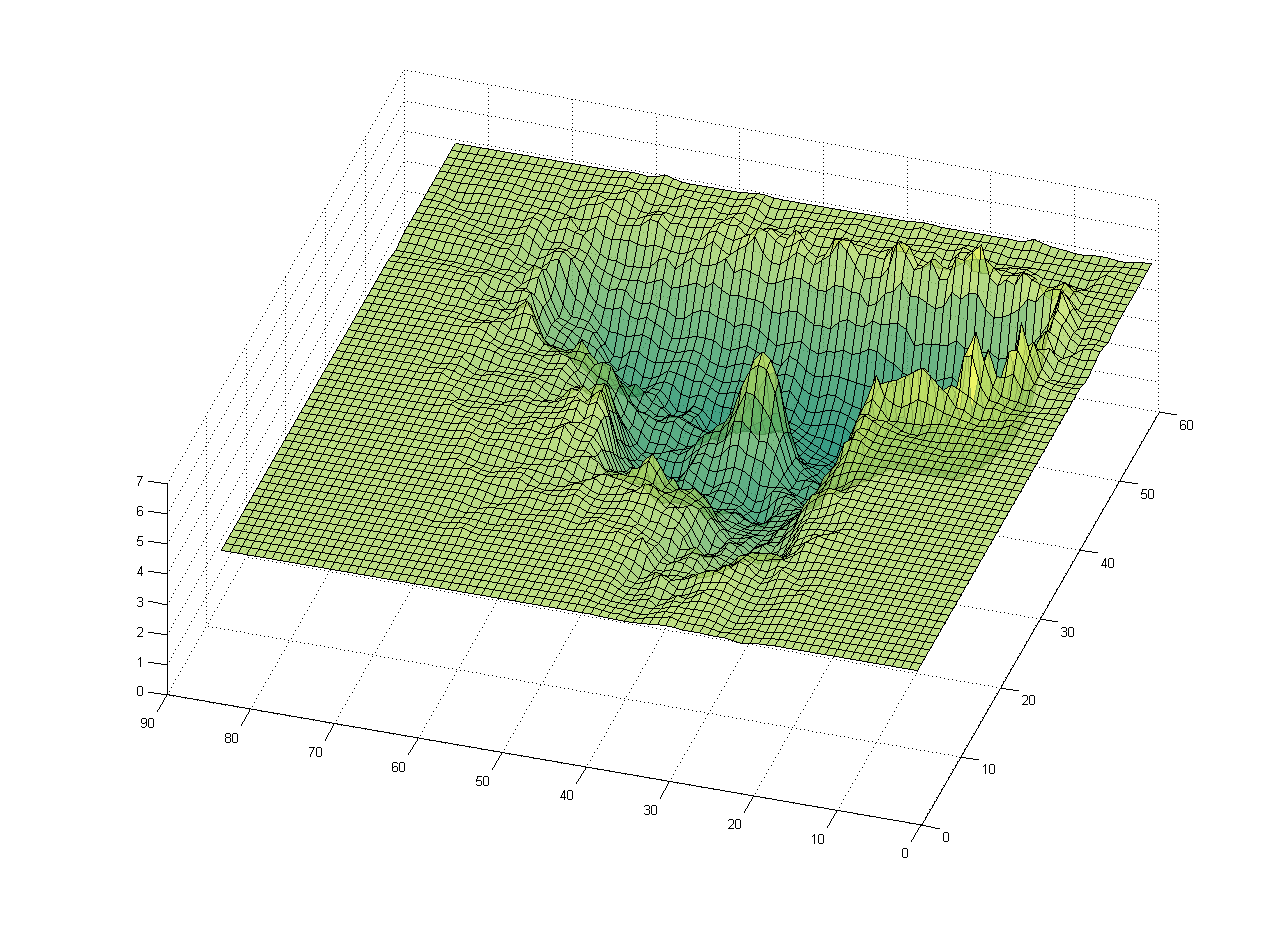
Visualisering av mätdata från en provkörning i en testbana. (Klicka på bilderna för att ladda originalet.) Vi gjorde vissa justeringar av vinklarna i datan i efterhand eftersom osäkerheten i dessa är ganska hög när roboten svänger.
Film (avi, 29360k) som visar hur roboten rör sig.
Kommentarer
Konstruktionen fungerar och vi får in mätdata som kan relateras till omgivningen roboten har kört omkring i och vi har utvecklat metoder att rita upp den på ett vettigt sätt. Det finns dock utrymme för förbättringar, särskilt när det gäller styrningen och positioneringen, som inte är så exakt som vi önskar. Ett större batteri hade också varit till fördel, men sammanfattningsvis är vi mycket nöjda med kursen och rekommenderar den till alla som är sugna på att bygga riktiga saker och inte bara syssla med teori.