Wall E. är resultatet av vĺrt projekt i kursen EDI021. Det är en mobil konstruktion som klarar av att undvika hinder med hjälp av en avstĺndssensor. Vidare klarar den av att bedömma vilket hĺll som är mest lämpligt att svänga vid valet av höger och vänster. Konstruktionen är utformad som sĺ att den flyttar sig frammĺt tills dess att ett föremĺl framför den befinner sig tillräckligt nära. Därefter roterar vi avstĺndssensorn ĺt höger samt vänster med hjälp av servon som den är fäst pĺ för att avgöra ĺt vilket hĺll som har längst sträcka med fri yta pĺ. Därefter svänger Wall E. ditĺt och fortsätter sin färd pĺ samma sätt som tidigare.
Kursen EDI021 har bjudit pĺ mycket eget planerande och arbetande samt informationssökande. Det har ocksĺ varit väldigt lärorikt pĺ hĺrdvarufronten för oss som inte har arbetat alltför mycket inom detta omrĺde tidigare.
Av: Marie Li Korse och Aron Lidé
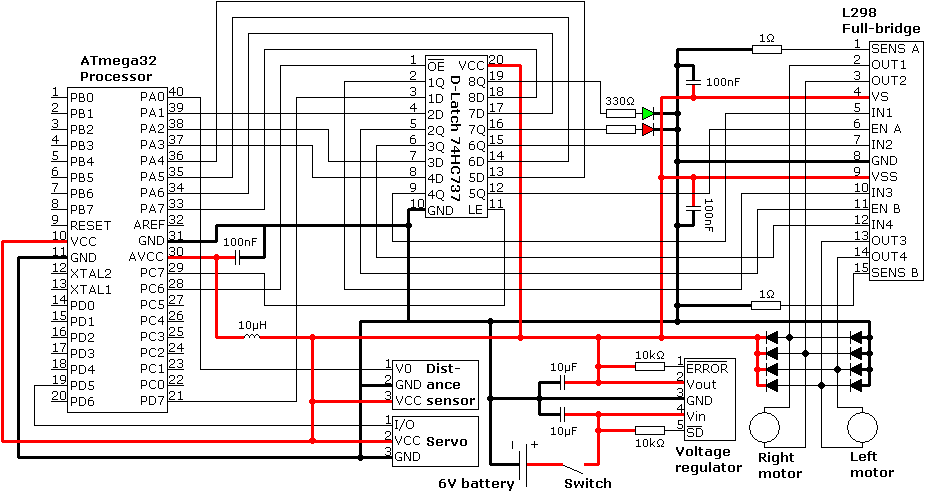
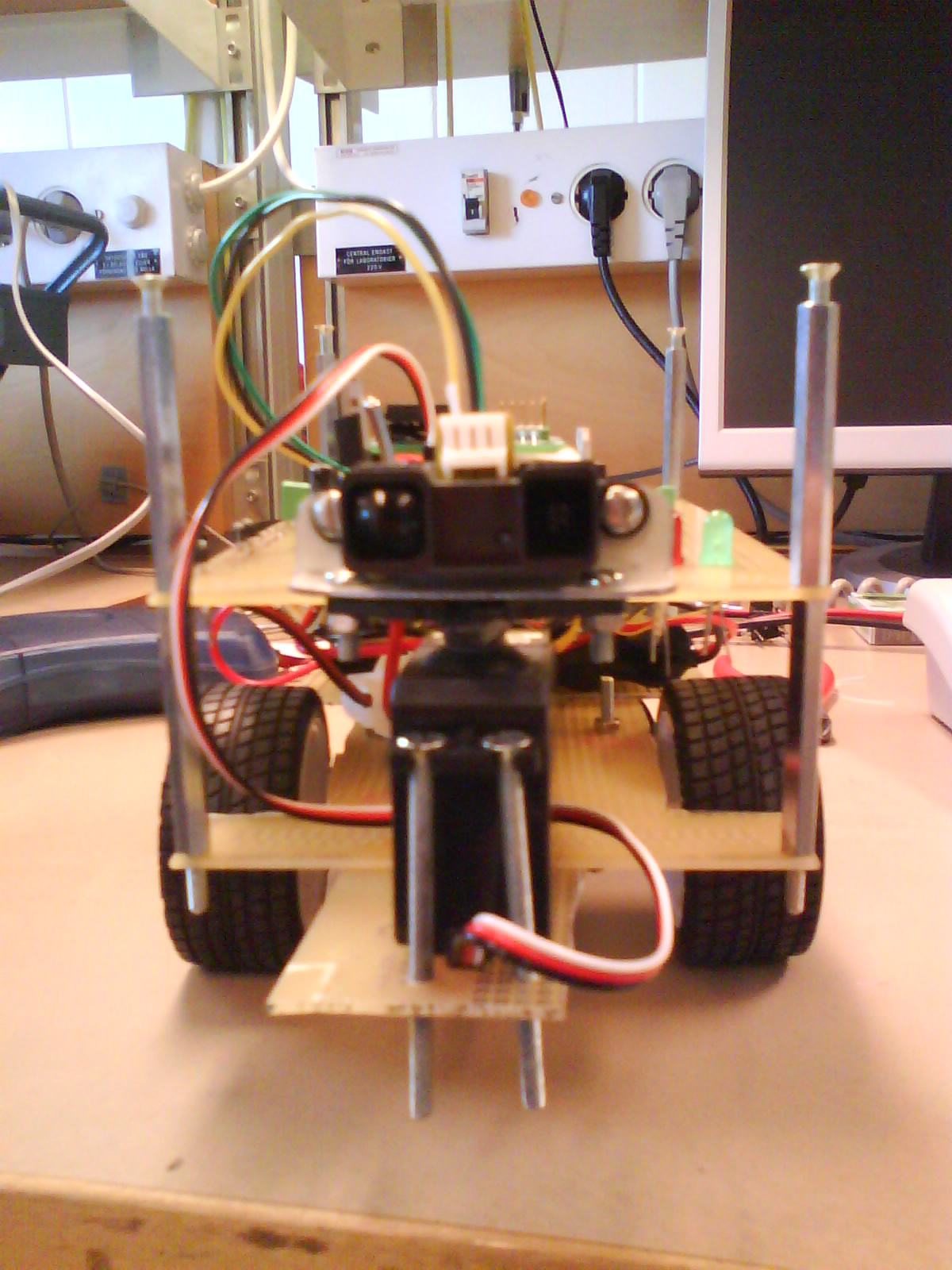
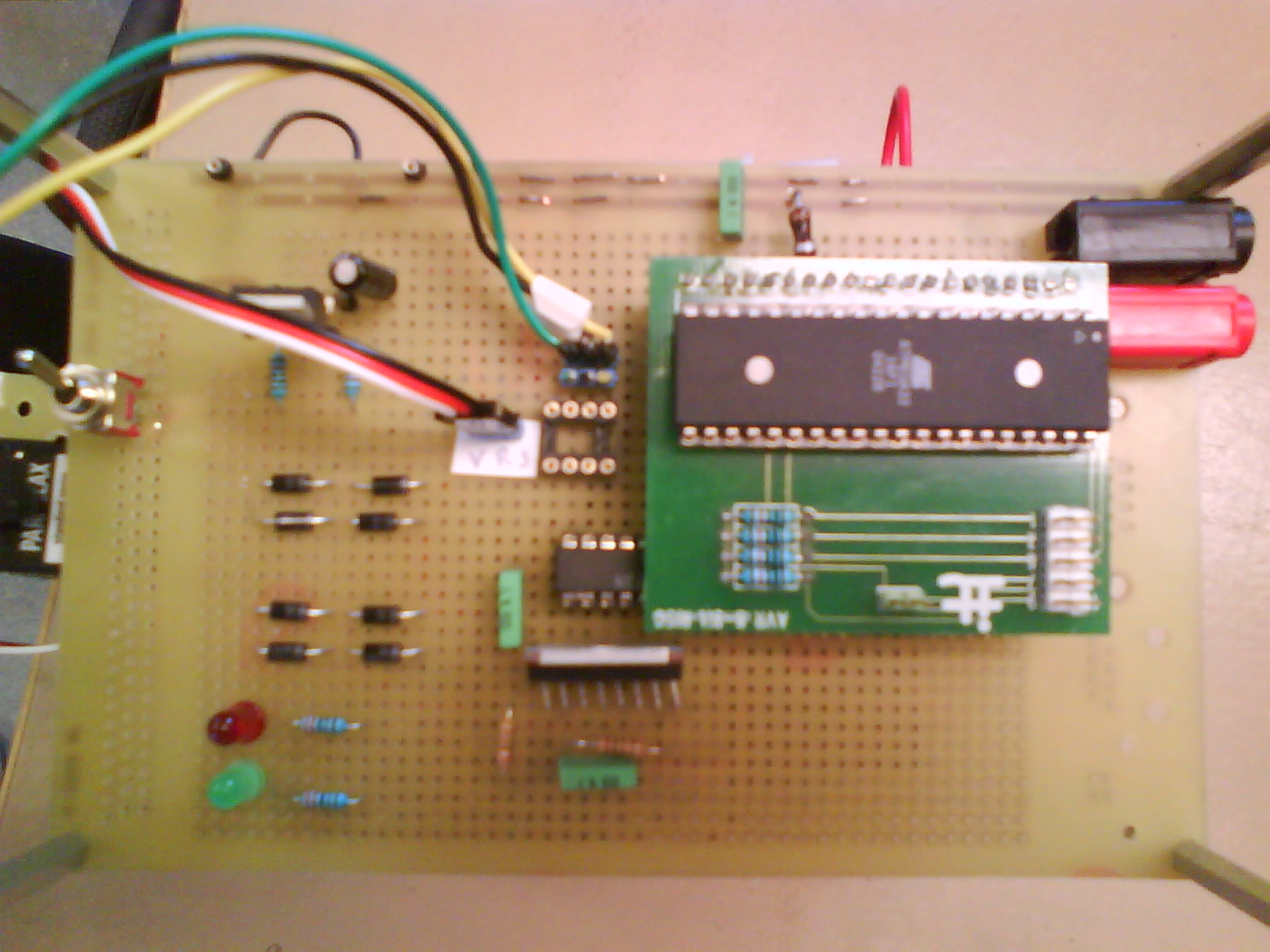
Bilder