CarL |
|
Vĺrt projekt gick ut pĺ att bygga en bil som skulle kunna följa en utsatt tejpremsa.
Som sensor använde vi 2 st fotodioder som detekterar ljusförhĺllandena vid tejpen och golvet. |
 Bilen sedd frĺn sidan, körriktning ĺt höger. 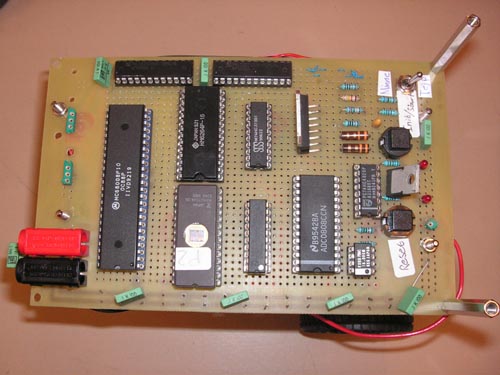 Bilen sedd uppifrĺn, kopplingsplattan med de flesta komponenterna. 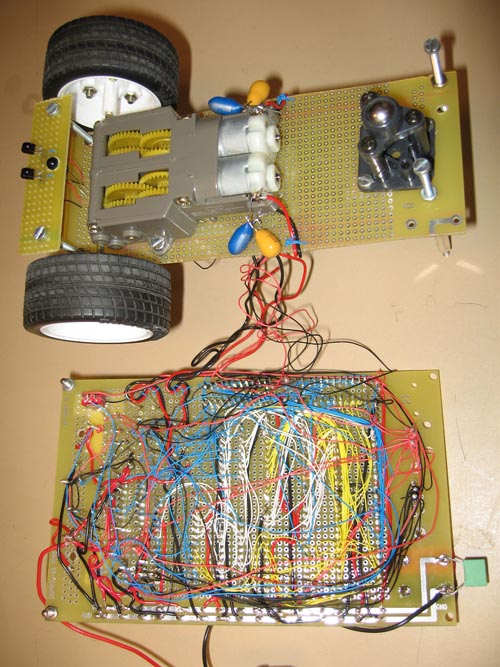 Undersidan av bilens. Längst upp ser vi motorerna och de tvĺ fotodioderna som läser av ljusförhĺllandet och en IR-diod som används för att ta bort bakgrundsstörningar, t.ex. om solen gĺr i moln. Pĺ undre delen kan man se hur vi har kopplat de olika komponenterna pĺ bilens ovansida. 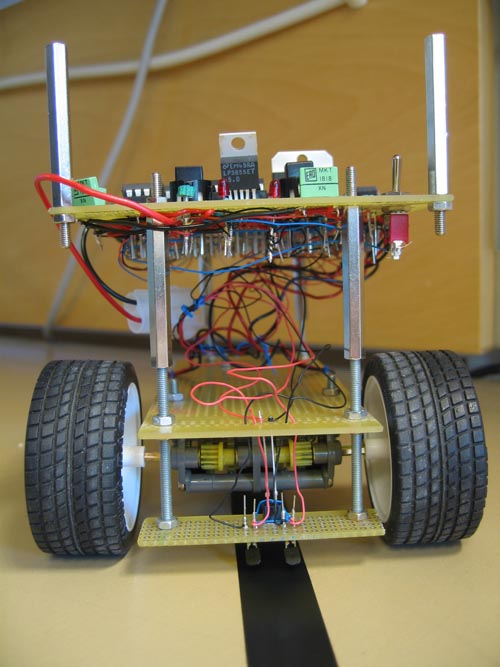 Bilen sedd frammifrĺn, här kan man se hur de 2 fotodioderna förhĺller sig till tejpen. |