Ljusföljande 2-hjulig robot
Erik Adlers, David Eklund och
Daniel Rasmusson
|
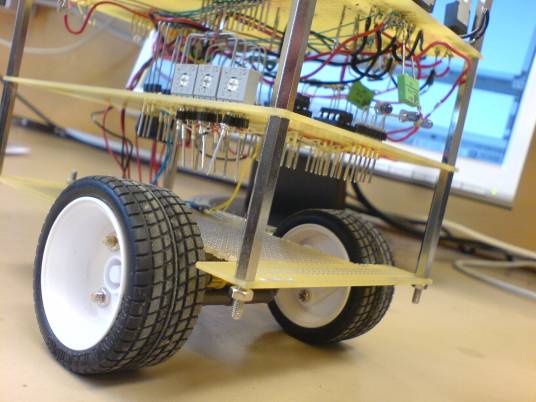
Målet
med projektet var att bygga en 2-hjulig mobil robot som m.h.a. sensorer
skulle kunna följa och hålla avståndet till en ljuskälla. För att få roboten
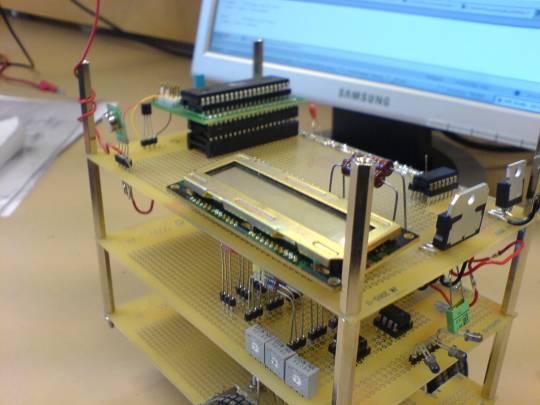
att göra detta använde vi en enchipsdator från Atmel (AVR Mega16) som vi
programmerade i programmeringsspråket c. På roboten hade vi även en
LCD-display och en trådlös radiolänk till en dator för att skicka
statusmeddelanden. För att följa ljuskällan hade vi tre ljussensorer som vi
skickade in till processorn via elektriska förstärkarkretsar och en
analog/digital-omvandlare. Hela roboten fick ström från ett 6 volts batteri
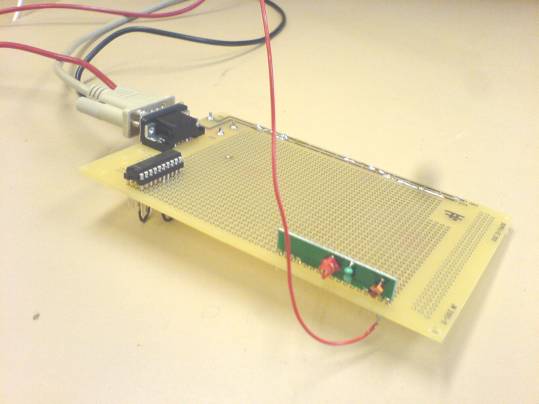
som vi transformerade ner till 5V utom för motorerna. Radiosignalen från roboten togs emot av en mottagarkrets som kopplades in till en PC via den seriella porten. Till PCn skrev vi ett program i JAVA som läste av signalen och skrev ut informationen i ett konsoll-fönster. { Källkod
Robot
} { Källkod Mottagare } { Rapport
} |
|
Mottagarkretsen |