Robocar
Digitala projekt 8p, 2006
Johan Olsson E-01 och Filip Oredsson E-01
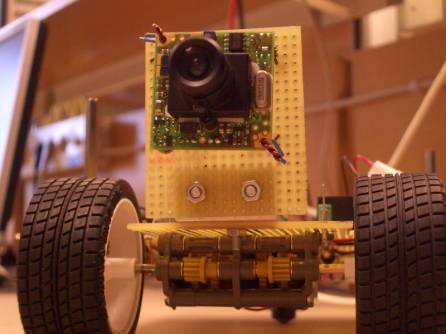
Det här projektet gick ut på att bygga en liten bil som är utrustad med en CCD-kamera och som med hjälp av den kan känna igen rörelser i sin omgivning. Målet var att bilen skulle kunna klara av att se en enkel rörelse i en tom korridor och följa efter den.
För att klara av att sampla videosignalen från CCD-kameran tillräckligt fort så fick vi göra en tillståndsmaskin i programmerbar logik som tog hand om all datainsamling från kameran och lagrade det i minnet.
För att avgöra om en rörelse inträffat i bilens omgivning jämförs två bilder tagna i följd och bilen kör sen i den riktning där störst variation mellan bilderna kan detekteras.
Här kan man läsa hela rapporten.