Digitala projekt – Bandvagn
Av Gustav Darpö och Henrik Lundstedt
2006-06-01
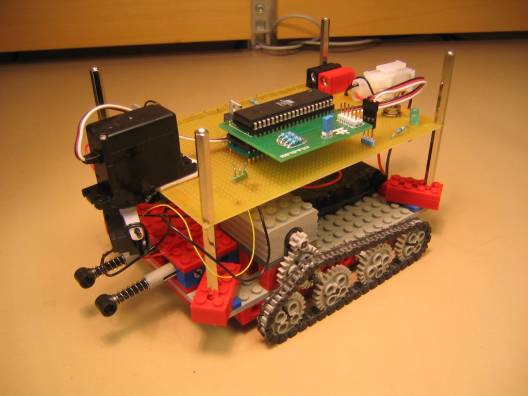
Vi har byggt en självgående robot som relativt obehindrat kan ta sig fram i inomhusmiljöer.
Konstruktion
och funktion
Robotens chassi är byggt i LEGO. Resten består av ett kopplingsplatta.
Logiken är byggd kring en AVR ATMega16 processor. Denna har flera inbygga
funktioner såsom timers, A/D-omvandling och avbrottshantering. Yttre enheter
ansluts till de 32 pinnarna som kan hantera både input och output.
Roboten drivs av två stycken LEGO-motorer som är drevade för att erhålla
maximal styrka. Bandvagnsdriften gör det möjligt för roboten att vända på
stället. Roboten ”ser” genom en IR-avståndsmätare monterad på ett servo som
kontinuerligt sveper av området framför roboten. Utifrån denna information
fattas beslut om hur motorerna ska styras.
Resultat