Digitala Projekt – Självgående Robot
av Tomas Nilsson och Fredrik Persson
2006-05-18
Vi har valt att bygga en självgående robot vars syfte ursprungligen var att kunna köra runt obehindrat i inomhusmiljö och att kunna hitta andra robotar av typ. På grund av konstruktionsrelaterade hinder kunde det sist nämnda syftet ej uppfyllas. Istället har roboten fått en ny funktion som möjliggör fjärrstyrning med en vanlig TV-fjärrkontroll.
Så fungerar det
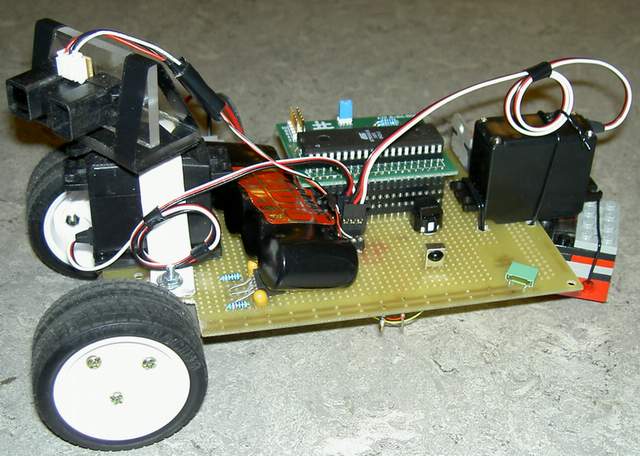
Robotens hjärta/hjärna är en Atmel AVR Mega16-processor. Den kan flashas med program ursprungligen skrivna i C, har inbyggt arbetsminne, flera stycken utportar/inportar, inbyggda A/D-ombvandlare och flera timers. Det går att generera avbrott från externa källor, från mjukvaran och från timersarna.
Robotens muskler består i två elmotorer som driver hjulen, en servo som vrider på ”huvudet” och en servo som vrider ett släpande styrhjul. På huvudet sitter den enda sensorn på hela roboten i form av en avståndssensor. Den vrids konstant fram och tillbaka medan den gör avståndsmätningar. Dessa mätvärden används sedan av programmet för att avgöra hur terrängen framför roboten ser ut.
Dessutom har roboten en IR-fotodiod som bara ser IR-ljus modulerat i 38 kHz (det som används av bl.a. TV-fjärrkontroller). M.h.a. en fjärrkontroll kan man därigenom säga åt roboten att köra automatisk respektive stanna. Man kan dessutom säga åt den att köra konstant rakt framåt, åt höger, åt vänster eller rakt bakåt.
Hur har det gått
Vi blev klara med roboten till slut och vägen dit var nästan bara vansinnigt intressant. Den första månaden satt vi fram till 1 på nätterna för att vi inte kunde släppa roboten och gå hem. Det är otroligt belönande att få se riktiga resultat när man lyckats göra en konstruktion efter en ursprunglig idé.
Vi rekommenderar denna kurs till alla som inte har bestämt sig för att teori är det ända som är viktigt i en civilingenjörs värld.
Filer
[Rapporten
(PDF)] [Film 1 (självgående)] [Film 2 (självgående)]
[Film 3 (självgående)] [Film 4 (manuellt
styrd)]