Styrning av mekanisk solros
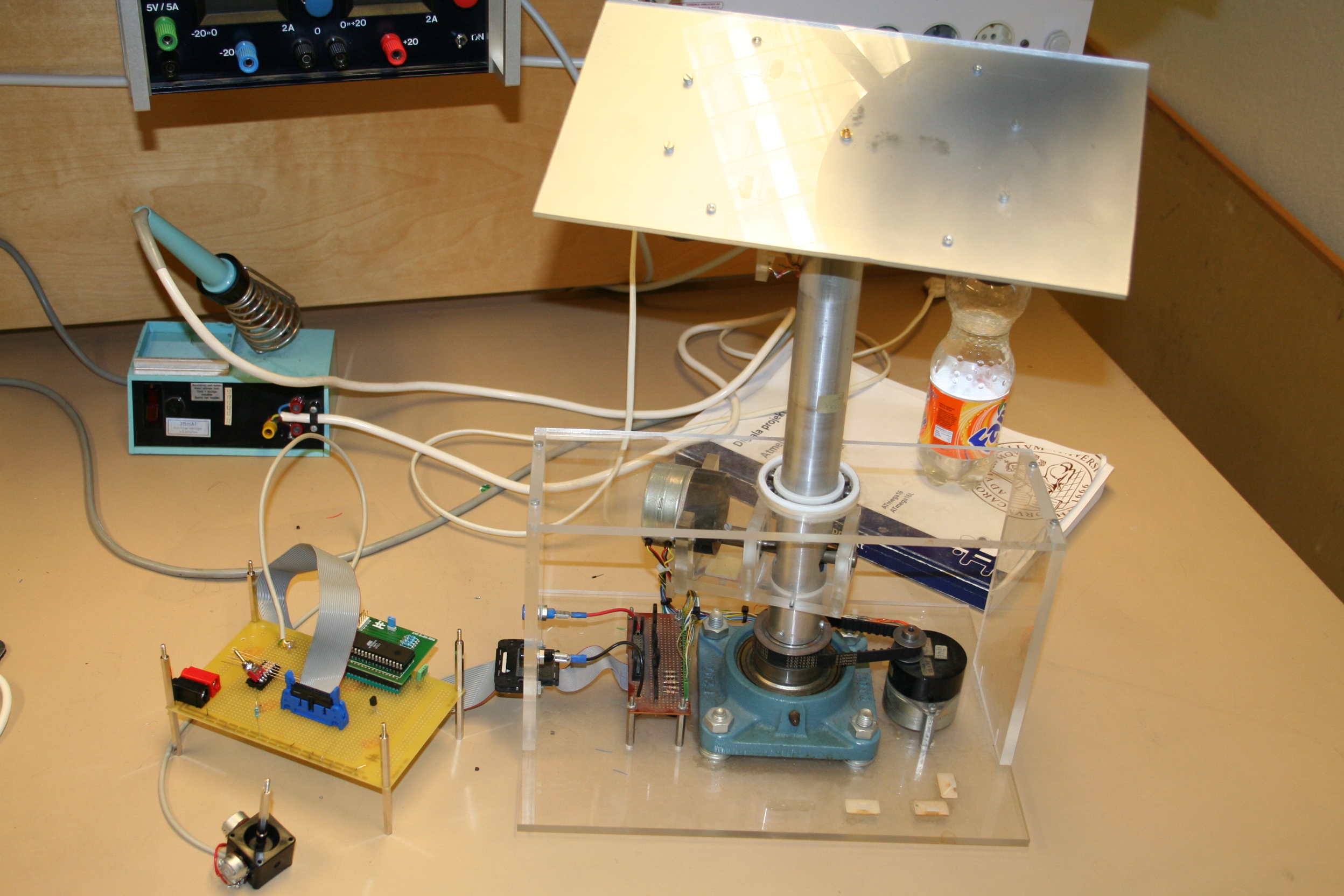
Utgĺngspunkten för projektet var en mekanisk konstruktion som har vissa likheter med en solros. Iden är att plattan överst upp skall kunna rikta sig emot och följa en rörlig ljuskälla. För att ĺstadkomma detta hade vi tvĺ motorer en för att vrida stĺngen (skälken) och en för att vrida plattan sĺ att den kan stĺ i olika vinklar frĺn marken. För att känna av var ljusstyrkan är starkast har vi fyra ljuskänsliga sensorer en i varje hörn av plattan. Sensorerna ger varierande spänning beroende pĺ hur mycket ljus de detekterar. Spänningen kan sedan med hjälp av en A/D-omvandlare (Analog till Digital omvandlare) bli tal som kan jämföras i vĺr enchipsdator den kan sedan beroende pĺ vilka värden den fĺr frĺn sensorerna styra motorerna sĺ att plattan följer ljuset. För att inte plattan ska röra sig för lĺngt och slĺ i stĺngen har vi givare som ger en signal när plattan kommer fram till dem. När detta sker lĺter vi inte motorn fortsätta röra sig i den riktningen. Om man vill styra solrosen manuellt gĺr detta ocksĺ att göra med en styrspak. Styrspaken är en enkel konstruktion som med hjälp av tvĺ variabla motstĺnd ger olika utspänning när man rör den i de bĺda leden. Den har tvĺ utsignaler (en för varje led) som precis som sensorerna kopplas till A/D-omvandlaren för att omvandla spänningen till ett binärt tal.
Rapporten
C källkod