 |
Mål: En
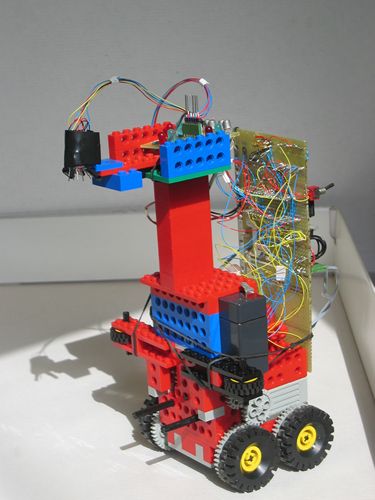
mus byggd i lego ska på femton minuter utan batteribyte söka av en
labyrint och därefter kunna välja snabbaste vägen från start
till mål. Labyrinten är uppbyggd av moduler med måtten 20x20 cm. Utförande: Den mekaniska biten är helt uppbyggd av lego (även lego-motorer). Roboten styrs av en programmerbar mikroprocessor (ATmega16) och den använder IR- och foto-dioder som "ögon". För att kunna orientera sig finns en trippmätare som mäter hur långt den kört eller hur många grader den roterat. |
| Status:
Programmeringen av roboten blev inte helt klar i tid till kursens
slut, men i dagsläget kan den dock läsa av delar av labyrinten och
minnas vad den sett. Om kursen: En mycket rolig och bra kurs som låter dig jobba självständigt och planera ditt arbete hur du vill. I vårt fall fick vi ta vara på saker vi hade lärt oss tidigare och använda dem på riktigt, vilket kändes bra. Fullständig rapport - klicka här |
 |