|
På Institutionen för Informationsteknologi utvecklas en
robot som skall på egen hand kunna ta sig fram i olika miljöer. Denna robot
har ett antal ultraljudsgivare placerade runt om sig. Dessa hjälper roboten
att känna ifall något föremål blockerar vägen. Tyvärr så kan inte vissa
smala föremål, som till exempel bordsben, upptäckas. Det är högst önskvärt
att utveckla något som hjälper roboten att ta sig fram på ett säkrare sätt,
med andra ord ett komplement till ultraljudsgivarna.
Kraven vi ställde redan från början var ganska enkla. Prototypen skall
kunna upptäcka föremål på ungefär 80 cm avstånd och helst så små föremål
som möjligt. Detta i sin tur skulle presenteras visuellt på en datorskärm,
likt en radarskärm.
Till vårt förfogande hade vi en servomotor, en infraröd avståndsmätare, en
ATMega16, RS232, kopplingsplatta samt en del resistorer och kondensatorer.
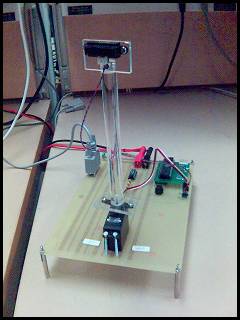
Slutprodukten blev en fungerande avståndsmätare där
resultatet presenteras på en datorskärm. Servomotorn roterar 180 grader med
en lämplig hastighet samtidigt som information om avståndet till närmaste
hinder i vägen och information om nuvarande vinkel skickas till datorn.
Ett, i Visual Basic skapat, program (se bilden) visar avståndet i form av
en vandrande röd punkt. Bakom den röda punkten finns olika avstånd utritade
så att man med hjälp av ögat kan uppskatta avståndet i centimeter.

Då vi tar hänsyn till kravspecifikationen anser vi att
vi har uppfyllt våra krav. Det är dock beklagligt att vår prototyp inte kan
upptäcka föremål på 80 centimeters avstånd utan upp till cirka 50 cm. Detta
anses bero på att dioderna inte hinner stabilisera sig så snabbt. Även
bakgrundsstrålningen och bakgrundsmaterialet påverkar mätningen. Vi valde
att ha en lämplig svephastighet istället för långsamma men mer noggranna
mätningar. Däremot så kan föremål med en bredd på endast 1 millimeter och
på cirka 10 till 15 centimeters avstånd upptäckas.
Vid efterkommande utveckling av denna prototyp skulle man kunna öka
mätavståndet genom att eventuellt använda snabbare och mer stabila
IR-dioder. Även en kombination av flera IR-dioder och något långsammare
svepning skulle bidra till ökad noggrannhet och längre synfält för den
infraröda avståndsmätaren.
I överlag är vi mycket nöjda med kursen då vi ännu en gång har bevisat för
oss själva att genom tålamod och envishet så kan även okända barriärer
brytas. En bra kurs där man praktiskt kan tillämpa den teori man har lärt
sig under utbildningen. För att ladda ner hela rapporten och källkoden
klicka på respektive länk nedan.
Rapport Källkod
|