Digitala Projekt – Temperaturreglerare
Idé
Det finns mĺnga system som under drift alstrar en hel del värme, för att rĺda bot pĺ det sätts diverse kylning in. Eftersom kylningen, oftast i form av fläktar, dimensioneras för att klara ett värsta-fall brukar även en hel del ljud uppkomma. Tanken bakom vĺrt projekt är att slippa undan onödigt ljud genom att endast köra fläktarna tillräckligt fort för att uppnĺ önskad kyleffekt.
Konstruktion
Hjärnan i konstruktionen är en 68008-processor frĺn Motorola. Sensorer i form av NTC-motstĺnd ger indata till systemet via en A/D-omvandlare. Styrsignaler till fläktmotorerna ges av en motordrivkrets som drivs av utgĺngarna pĺ en D-vippa.
Styrprogrammet utformades sĺ att man kan relatera de inkopplade sensorerna till de inkopplade fläktarna med olika beroenden. Pĺ sĺ vis kan samma temperatursensor pĺverka flera fläktar olika mycket. Fläktarna pĺverkas alltsĺ av flera sensorer.
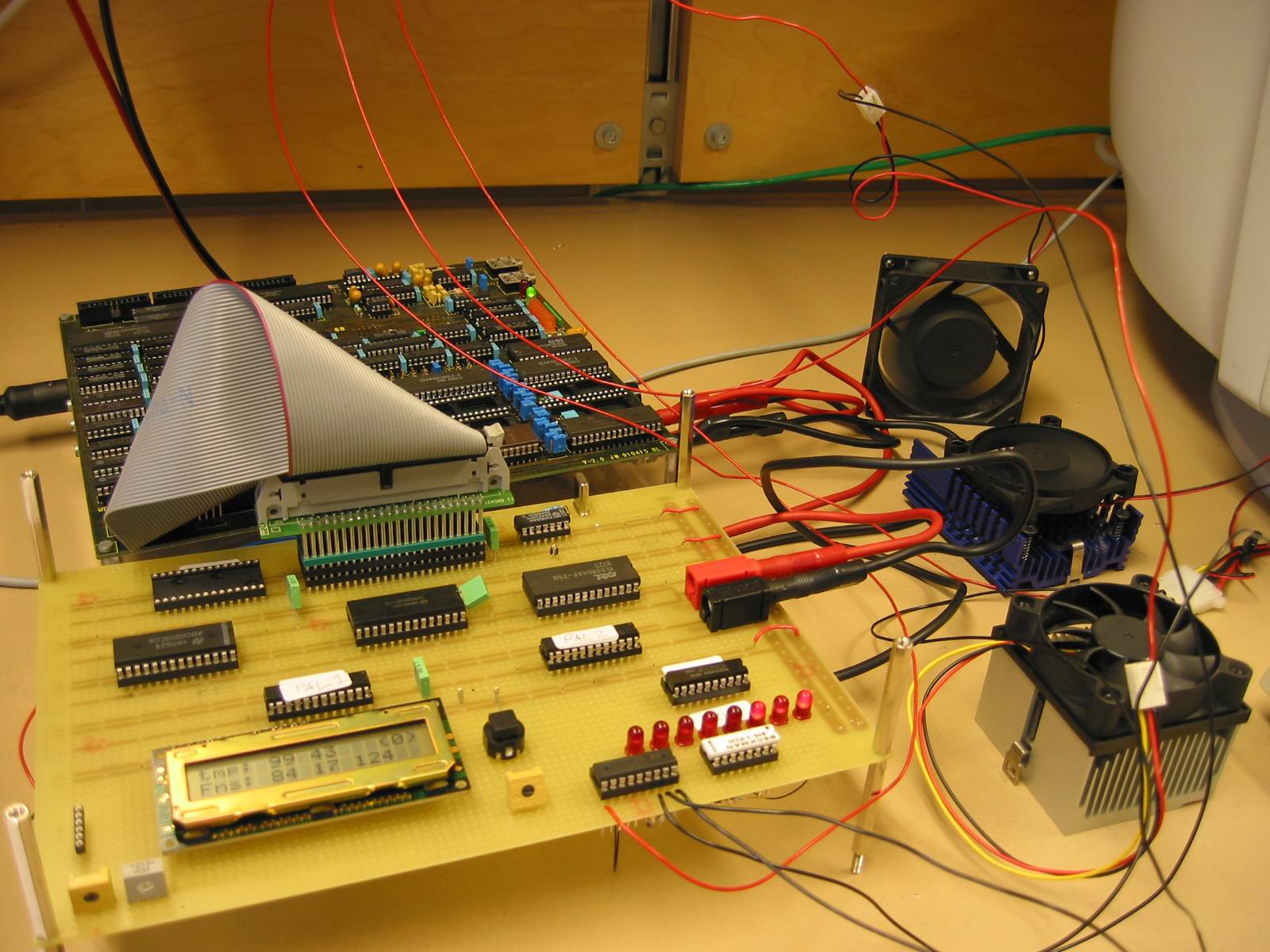
Konstruktionen i drift med utvecklingsmiljön inkopplad.
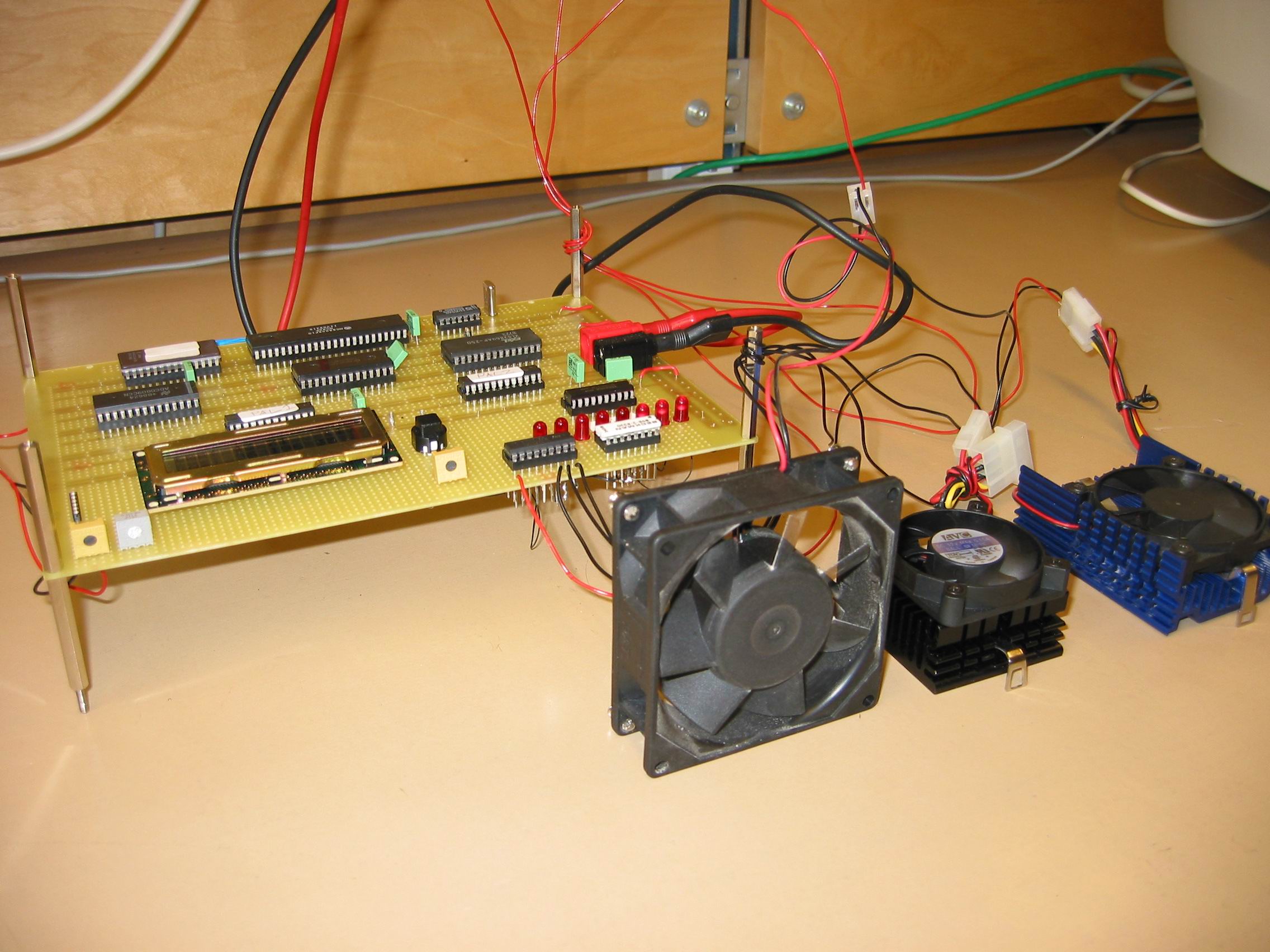
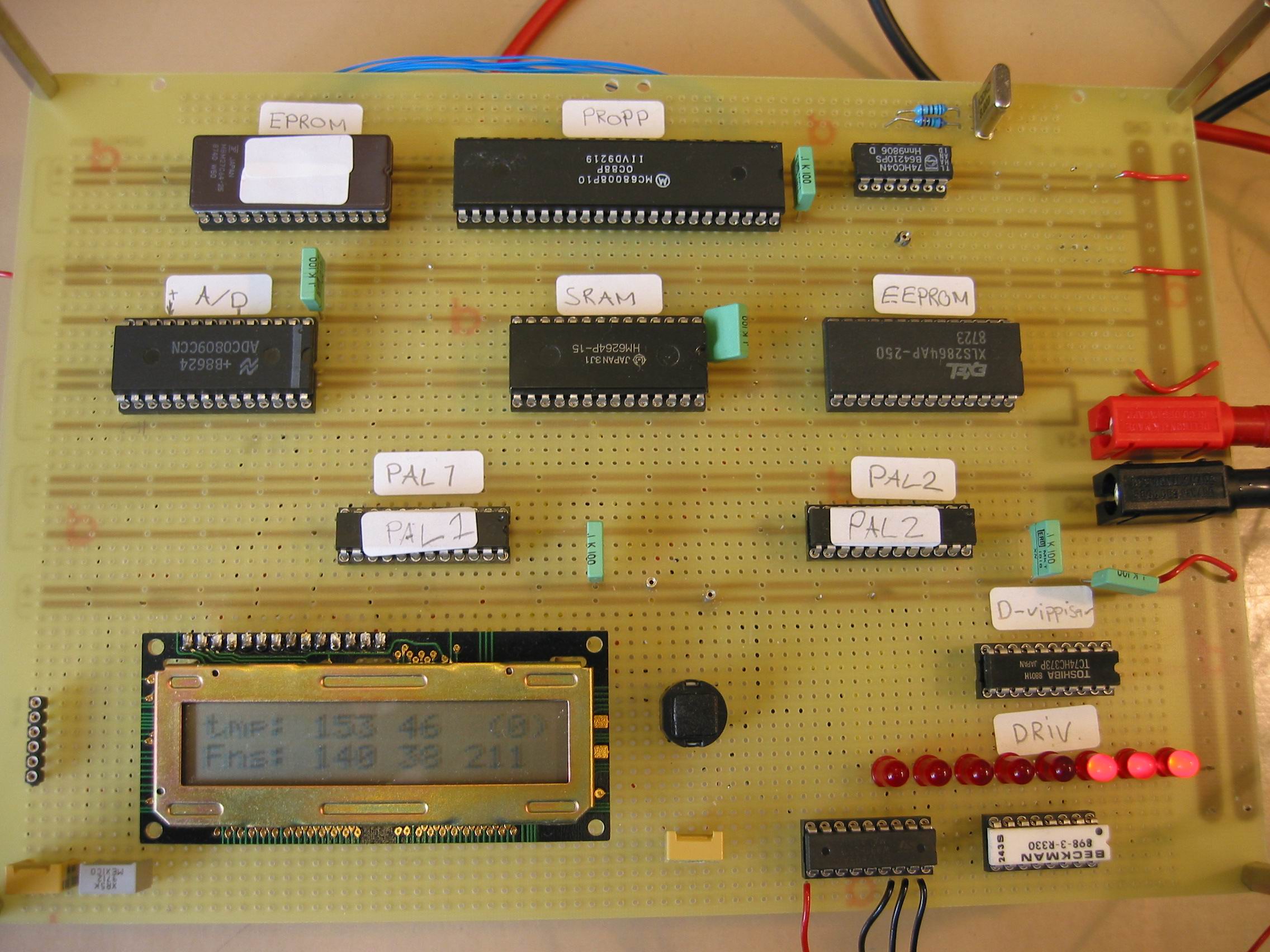
Slutgiltig konstruktion. Helt autonom!
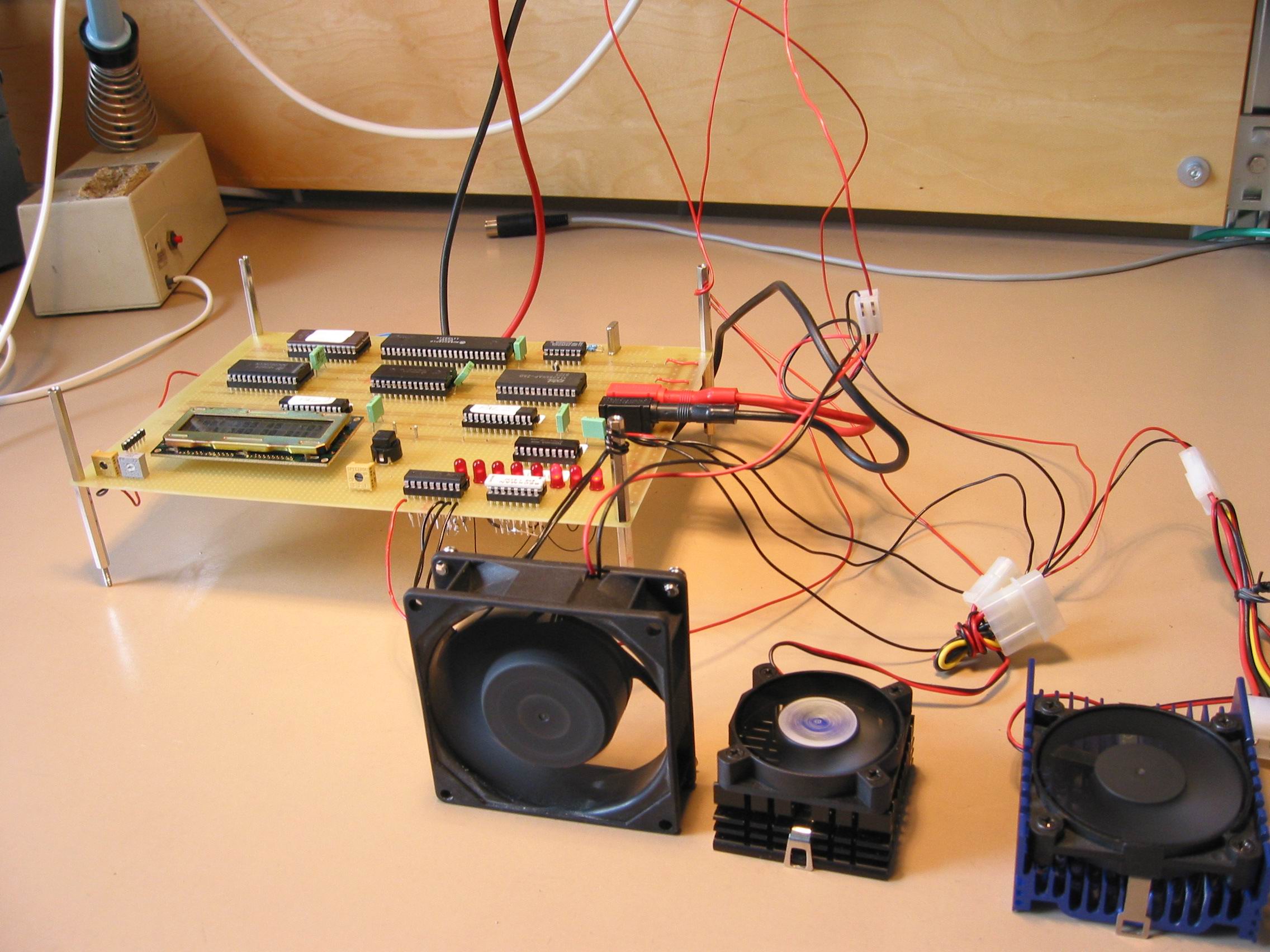
Vĺr autonoma konstruktion i drift ur en annan synvinkel.
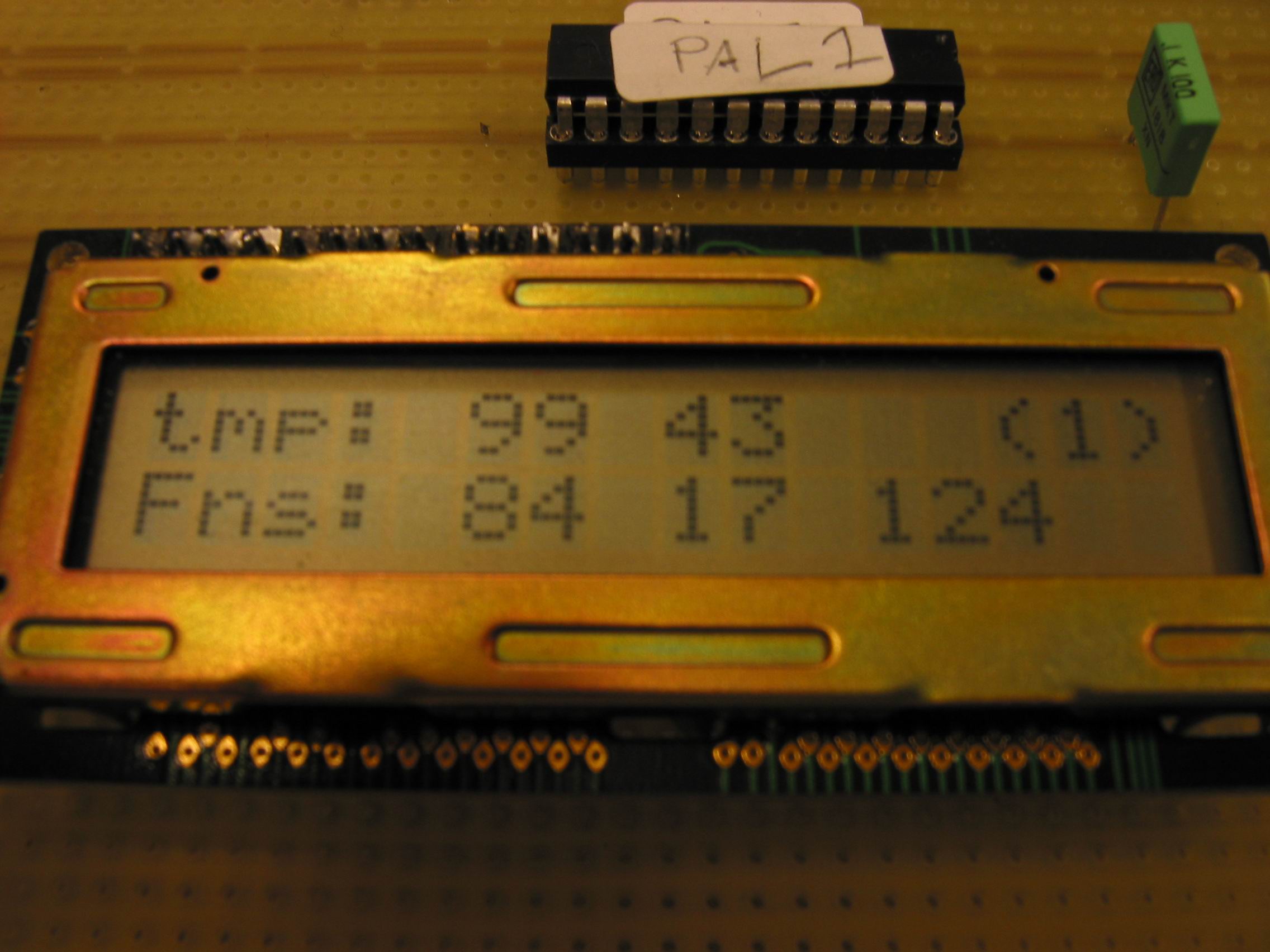
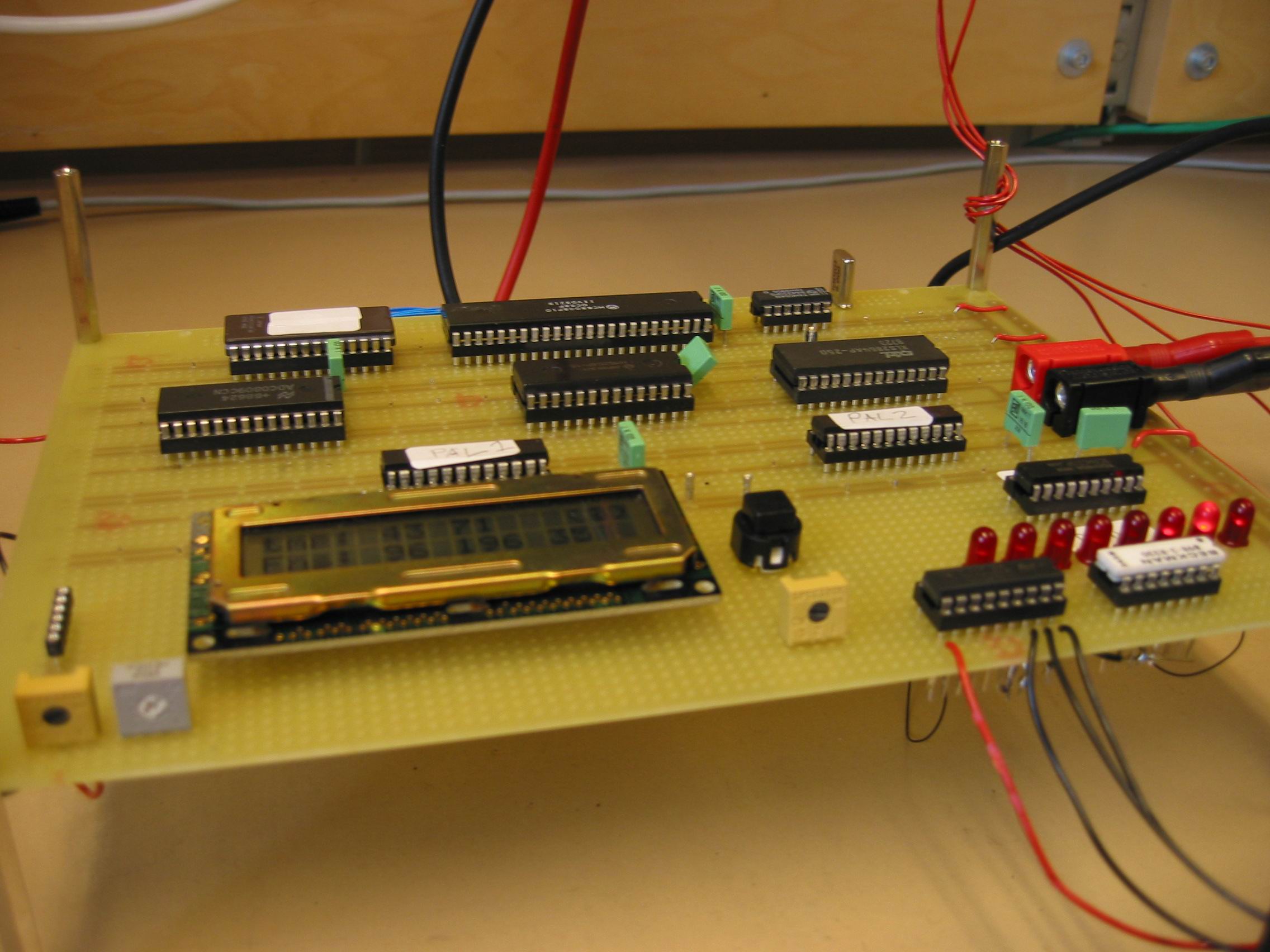
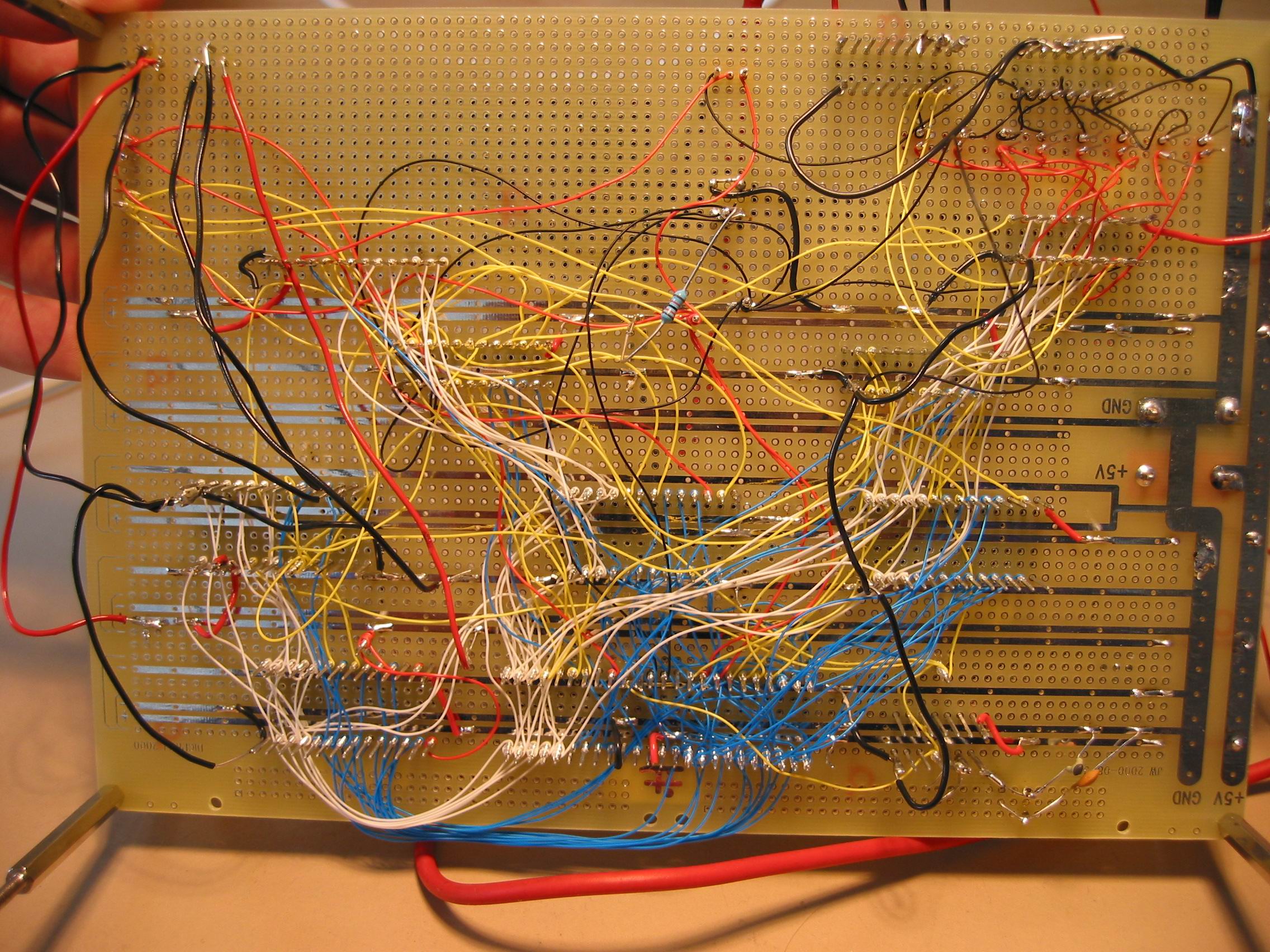
Närbild pĺ själva konstruktionen.
Resultat
Det slutliga systemet fungerar i stort sett som vi tänkt oss, en del upptäckter har dock gjorts.
Det gĺr att köra fläktarna betydligt saktare än deras minsta starthastighet, men dĺ mĺste man först varva upp fläkten lite högre än mĺlhastigheten.
Vid vissa mindre lämpliga pulsfrekvenser lĺter fläktarna
betydligt mer än väntat, sannolikt pĺ grund av självresonans.
Länkar
{kind=link}
Bilaga 2a: Kod del 1: h-fil med definitioner.
Bilaga 2b: Kod del 2: c-fil med rutiner och funktioner.
Simulatorn för den som vill prova.