In the digital project course we built an electronic device to transmit an ultrasonic pulse sequence and measure the time taken for the echoes to return. The measured distance is displayed on an alphanumeric LCD.
I kursen digitala projekt skall man bygga en elektronisk grunka styrd av digitala komponenter. Vi ville experimentera lite med ultraljud och beslöt oss därför för att bygga en avstĺndsmätare som skickar ut en ultraljudspuls och mäter tiden det tar för ekot att komma tillbaks.
Vi tycker om blinkande lampor sĺ vi satte fast nĺgra lysdioder ocksĺ.
Vĺr avstĺndsmätare behöver inte särskilt mycket minne:
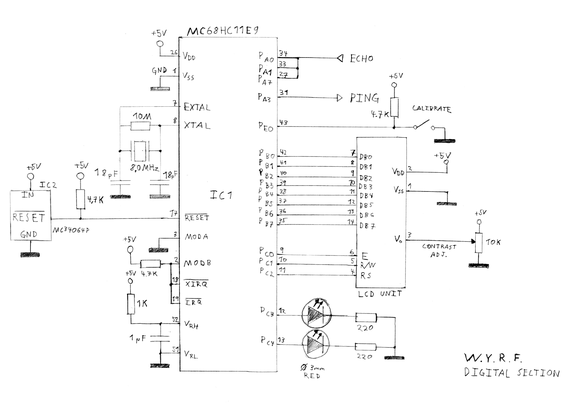
Eftersom HC11:an har lagom mycket minne (512 byte) och en inbygd pulsackumulator och timerkrets valde vi att bygga vĺrt projekt runt en sĺdan. Att man slipper vira databussar och dylikt ser vi som en liten bonus.
Till en början hade vi tänkt oss en visningsyta byggd med blinkande röda lysdioder och en röd alfanumerisk LED-display. De planerna fick vi dock skrota efter tvĺ dagars slit med att förgäves försöka fĺ den fina alfanumeriska display-modulen att lysa som vi vill. Avsaknaden av datablad för just den modellen vi hade var nog ett av de huvudsakliga skälen. Istället pluggade vi i en alfanumerisk LCD som fungerade vid första försöket. Dĺ blev vi glada.
En SHARP Dot-Matrix LCD Unit styrs med nĺgra kontrollbitar och en ĺttabitars databuss. Kontrollsignalerna RS, RW och E kopplade vi till port C. Vi kopplade databussen till port B, vilket tyvärr innebär att vi inte kan läsa frĺn den. Det fĺr man betrakta som en liten rest frĺn den ursprungliga designen med en alfanumerisk LED.
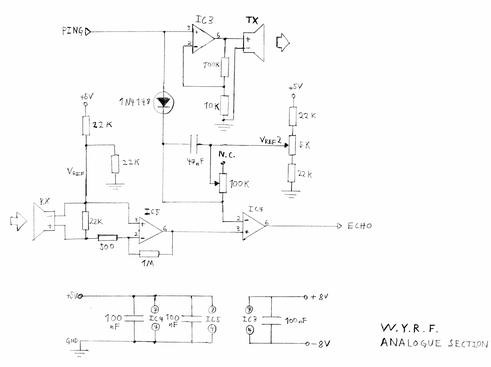
Tyvärr krävs en del analog elektronik för att hantera ultraljuds-sändaren och mottagaren. Pĺ ett ben (port A) pĺ mikroprocessorn generar vi en ca 40 kHz fyrkantsvĺg (PING-signalen) som vi förstärker med hjälp av en operationsförstäkare. För att fĺ en lagom stark utsignal använde vi oss av en sekundär spänningskälla pĺ plus minus ĺtta volt.
Den analoga utsignalen frĺn mottagarelementet (dvs ECHO-signalen) förstärker vi med en operationsförstärkare och sen använder vi en sista operationsförstärkare (komparator) för att trigga och generera en digital puls in till tre olika ben pĺ port A. Vi valde att koppla ekosignalen till tre ben sĺ att vi kunde testa lite olika sätt att detektera ekopulsen i mjukvaran.
För att successivt öka känsligheten pĺ mottagaren efter hand som tiden gĺr efter att pulstĺget skickats iväg byggde vi en dämpningskrets. En kondensator laddas upp när pulstĺget skickas och sen laddas den successivt ur. Hastigheten pĺ urladdningen bestäms av urladdnings-potentiometern. Kondensatorn pĺverkar, tillsammans med omslagsnivĺ-potentiometern omslgsnivĺn pĺ komparatorn.
Vi hade lite problem med att insignalen blev väldigt känslig för brus. Det visade sig att spänningen till insignalförstärkaren lĺg och flöt när ingen insignal togs emot. Dessa variationer förstärktes och genererade sĺ pass mycket falska mätsignaler att det var nästan omöjligt att urskilja de äkta bland dessa. Problemet visade sig bero pĺ att vi hade designat vĺr WYRF för att använda bipolära operationsförstärkare, medans kretsarna vi fick använda var CMOS-kretsar. Efter en hel del huvudbry, lite handpĺläggning, en avklippt sladd som inte satt där den skulle, och en resistans över mottagarens piezoelement sĺ fick vi till slut en klar och tydlig signal ända upp till tvĺ meters avstĺnd.
Mjukvaran bestĺr av tre moduler. En modul för att hantera LCD-skärmen och lysdioderna (disp). En modul för att hantera ivägskickning av pulstĺget och tidtagning av ekot (echo). Slutligen sĺ har vi huvudmodulen som innehĺller styrlogik och periodiskt skickar iväg ett pulstĺg, mäter tiden och presenterar resultatet. Huvudmodulen har även hand om initiering av hĺrdvaran och kalibrering av mätvärden.
Till en början hade vi tänkt oss ha ett avbrottsstyrt program där vi plockar tiden frĺn timingkretsen via ett avbrott. Eftersom insignalen var lite väl brusig sĺ fick vi backa och använda oss av en loop som ligger och rĺ-pollar sĺ snabbt den kan och returnerar medelvärdet pĺ tiden av alla höga samplingar.
Se bilaga för källkodslistning.