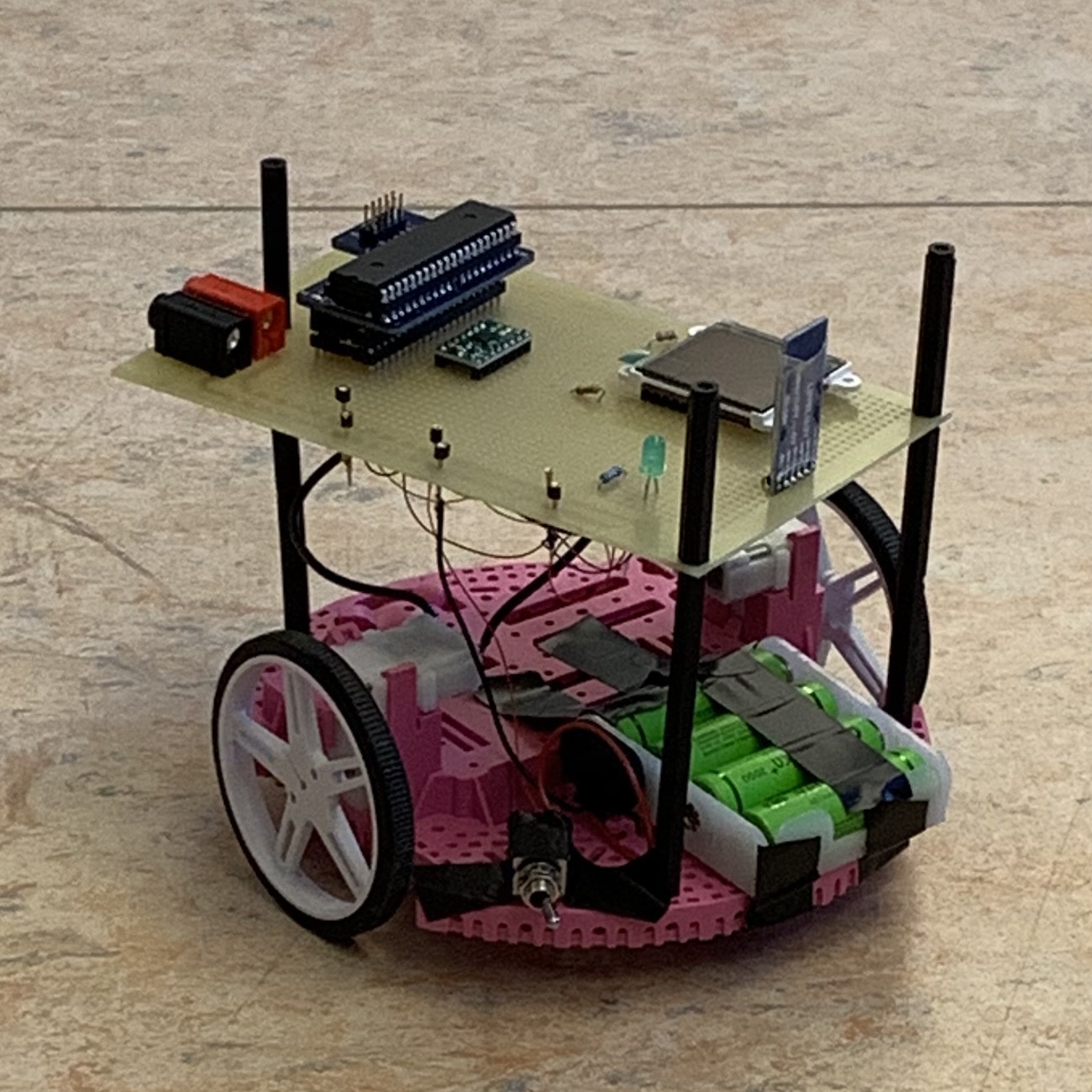
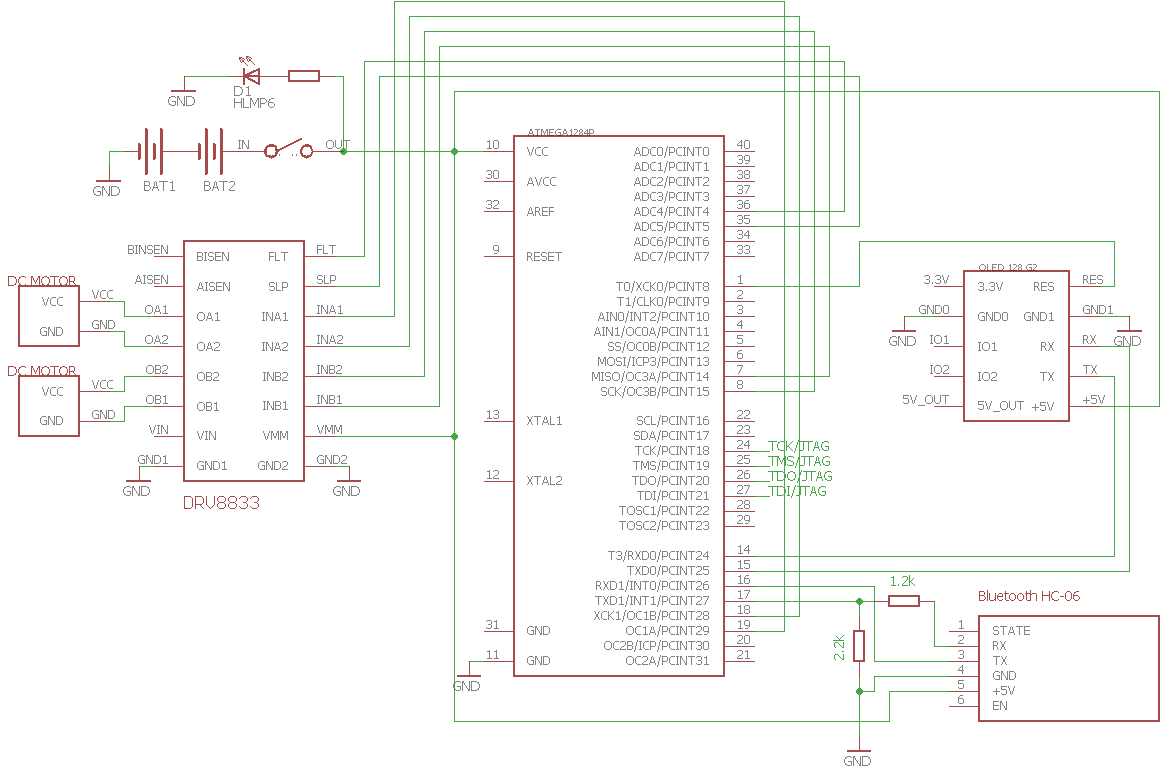
If you place the cursor inside the table below and scroll to see the code it took to programme RoboWalter
| /* |
| * robo_walter.c |
| * |
| * Created: 2019-04-04 13:43:00 |
| */ |
| #define F_CPU 1000000UL |
| #define BAUDE_RATE 9600 |
| |
| #include <avr/interrupt.h> |
| #include <avr/io.h> |
| #include <util/delay.h> |
| |
| void usartInit(); |
| char usartReceive(uint8_t channel); |
| void usartTransmit(uint8_t channel, unsigned char data); |
| |
| void timerInit(); |
| void setPulseLeftA(uint8_t pulse); |
| void setPulseLeftB(uint8_t pulse); |
| void setPulseRightA(uint8_t pulse); |
| void setPulseRightB(uint8_t pulse); |
| |
| void leftForward(uint8_t speed); |
| void leftBackwards(uint8_t speed); |
| void rightForward(uint8_t speed); |
| void rightBackwards(uint8_t speed); |
| |
| void oledInit(uint8_t size); |
| void sendString(unsigned char *, int); |
| void sendChr(unsigned char); |
| void newLine(); |
| void newEmpty(); |
| void drawCircle(int16_t x, int16_t y, int16_t radius, int16_t color, int16_t filled); |
| void drawLine(int8_t x1, int8_t y1, int8_t x2, int8_t y2, int16_t color); |
| void sendSmiley(int x); |
| void drawMouth(double happines); |
| |
| void init(); |
| |
| volatile uint8_t speedOffset = 0; |
| volatile uint8_t currentLeftSpeed = 0; |
| volatile uint8_t lastLeftSpeed = 0; |
| volatile uint8_t currentRightSpeed = 0; |
| volatile uint8_t lastRightSpeed = 0; |
| |
| int main(void){ |
| _delay_ms(4000); |
| init(); |
| |
| unsigned char stop[] = {0x00, 0x0C, 0x00, 0x00}; |
| sendString(stop, sizeof(stop)); |
| //PORT(A-D) write |
| //PIN(A-D) read |
| |
| //OC3B = INB2 |
| //OC3A = INB1 |
| drawFace(10.0); |
| while (1){} |
| } |
| |
| void drawFace(double happiness){ |
| drawCircle(64, 62, 60, 0xE1A0, 0) |
| //_delay_ms(50); |
| drawCircle(64, 64, 60, 0xEED2, 1) |
| _delay_ms(100); |
| drawCircle(35, 40, 10, 0xFFFF, 1) |
| drawCircle(89, 40, 10, 0xFFFF, 1) |
| |
| //_delay_ms(50); |
| unsigned char nose[] = {0x00, 0x05, 0, 8, 0x00, 58, 0x00, 58, 0x00, 54, 0x00, 58, 0x00, 70, 0x00, 74, 0x00, 70, 0x00, 70, 0x00, |
| 40, 0x00, 55, 0x00, 65, 0x00, 70, 0x00, 70, 0x00, 65, 0x00, 55, 0x00, 40, 0x00, 0x00} |
| sendString(nose, sizeof(nose)); |
| |
| if (happiness < 0){ |
| drawLine(25, 32, 48, 25, 0xE1A0); |
| drawLine(103, 32, 80, 25, 0xE1A0); |
| |
| drawCircle(35, 40, 3, 0x0000, 1); |
| drawCircle(89, 40, 3, 0x0000, 1); |
| |
| }else{ |
| drawLine(25, 26, 48, 25, 0xE1A0) |
| drawLine(103, 26, 80, 25, 0xE1A0) |
| |
| drawCircle(35, 40, 3, 0x2B1D, 1); |
| drawCircle(89, 40, 3, 0x2B1D, 1); |
| } |
| |
| //_delay_ms(100); |
| drawMouth(happiness); |
| } |
| |
| void drawMouth(double happines){ |
| unsigned char init[] = {0x00, 0x05, 0, 10}; |
| sendString(init, sizeof(init)); |
| for(int x = 0; x < 10; x++){ |
| sendChr(0x00); |
| uint8_t f = (uint8_t)(30 + (68 / 9 * x)); |
| sendChr(f); |
| } |
| for(int y = -5; y <= 5; y++){ |
| if (y != 0){ |
| sendChr(0x00); |
| uint8_t g = 100 - (y * y / happines); |
| sendChr(g); |
| } |
| } |
| sendChr(0x00); |
| sendChr(0x00); |
| } |
| |
| /** |
| * Initialize all variables, methods. |
| */ |
| void init() { |
| cli(); |
| usartInit(); |
| timerInit(); |
| |
| //set input for Bluetooth module input(TX) (RXD1 on atmega) |
| DDRD &= ~(1 << 2); |
| |
| //Enable SLP H-brygga |
| DDRA |= (1 << DDRA5); |
| PORTA |= (1 << DDRA5); |
| |
| oledInit(3); |
| //Set first bit in the status register (SREG) |
| sei(); |
| |
| leftForward(0); |
| rightForward(0); |
| } |
| /** ##### BLUETOOTH MODULE INTERRUPTS ##### |
| * This part will run whenever we recieve something |
| * from the Bluetooth module. |
| */ |
| ISR(USART1_RX_vect){ |
| volatile unsigned char data = UDR1; |
| |
| volatile uint8_t speed = 140; |
| |
| lastLeftSpeed = currentLeftSpeed; |
| lastRightSpeed = currentRightSpeed; |
| usartTransmit(1, data); |
| |
| switch(data) { |
| |
| //a left forward |
| case 193: |
| leftForward(speed); |
| currentLeftSpeed = speed; |
| break; |
| |
| //b left backwards |
| case 194: |
| leftBackwards(80); |
| currentLeftSpeed = 80; |
| break; |
| |
| //c right forward |
| case 195: |
| rightForward(speed i speedOffset); |
| currentRightSpeed = speed + speedOffset; |
| break; |
| |
| //ENTER right backwards |
| case 29: |
| rightBackwards(80); |
| currentRightSpeed = 80; |
| break; |
| |
| //, right stop |
| case 92: |
| leftForward(0); |
| currentLeftSpeed = 0; |
| break; |
| |
| //. left stop |
| case 94: |
| rightForward(0); |
| currentRightSpeed = 0; |
| break; |
| |
| //8 both stop |
| case 112: |
| case 120: |
| rightBackwards(0); |
| leftBackwards(0); |
| currentRightSpeed = 0; |
| currentLeftSpeed = 0; |
| break; |
| |
| //9 add to speedoffset |
| case 121: |
| case 113: |
| speedOffset += 2; |
| break; |
| |
| //I add to speedoffset |
| case 217: |
| case 209: |
| speedOffset -= 2; |
| break; |
| |
| //J left fast forward |
| case 218: |
| case 210: |
| leftForward(speed * 1.6); |
| currentLeftSpeed = speed * 1.6; |
| break; |
| |
| //K left slow forward |
| case 219: |
| case 211: |
| leftForward(speed * 0.4); |
| currentLeftSpeed = speed * 0.4; |
| break; |
| |
| //L right fast forward |
| case 220: |
| rightForward(speed * 1.6); |
| currentRightSpeed = speed * 1.6; |
| break; |
| |
| //M right slow forward |
| case 221: |
| rightForward(speed * 0.4); |
| currentRightSpeed = speed * 0.4; |
| break; |
| case 102: |
| rightForward(255); |
| leftForward(255); |
| currentRightSpeed = 250; |
| currentLeftSpeed = 250; |
| break; |
| |
| } |
| uint8_t max = (currentLeftSpeed > currentRightSpeed) ? currentLeftSpeed : currentRightSpeed; |
| max = (max > 200) ? 180 : max; |
| |
| if(max - 79 != 0) { |
| if((currentLeftSpeed != lastLeftSpeed) || (currentRightSpeed != lastRightSpeed)) { |
| drawFace(100 / (max -80)); |
| } |
| } |
| } |
| |
| //######### OLED ######### |
| |
| void oledInit(uint8_t size) { |
| //unsigned char clear[] = {0xff, 0xd7}; |
| unsigned char text_width[] = {0xff, 0x7c, 0x00, size}; |
| unsigned char text_height[] = {0xff, 0x7b, 0x00, size}; |
| unsigned char move[] = {0xff, 0xe4, 0x00, 0x00, 0x00, 0x00}; |
| //send_string(clear, sizeof(clear)); |
| sendString(text_width, sizeof(text_width)); |
| sendString(text_height, sizeof(text_height)); |
| sendString(move, sizeof(move)); |
| } |
| |
| inline void sendString(unsigned char * msg, int length) { |
| for(int i = 0; i < length; i++) { |
| sendChr(msg[i]); |
| } |
| } |
| |
| void sendChr(unsigned char c){ |
| while(!(UCSR0A & (1 << UDRE0))); |
| UDR0 = c; |
| } |
| |
| void newLine() { |
| unsigned char move[] = {0xff, 0xe4, 0x00, 0x01, 0x00, 0x00}; |
| sendString(move, sizeof(move)); |
| } |
| |
| void newEmpty() { |
| unsigned char move[] = {0xff, 0xe4, 0x00, 0x00, 0x00, 0x01}; |
| sendString(move, sizeof(move)); |
| } |
| |
| void drawCircle(int16_t x, int16_t y, int16_t radius, int16_t color, int filled){ |
| uint8_t x1 = (uint8_t)(x % 256); |
| uint8_t x2 = (uint8_t)(x >> 8); |
| |
| uint8_t y1 = (uint8_t)(y % 256); |
| uint8_t y2 = (uint8_t)(y >> 8); |
| |
| uint8_t rad1 = (uint8_t)(radius % 256); |
| uint8_t rad2 = (uint8_t)(radius >> 8); |
| |
| uint8_t color1 = (uint8_t)(color % 256); |
| uint8_t color2 = (uint8_t)(color >> 8); |
| |
| if(filled) { |
| unsigned char circledata[] = {0xff, 0xCC, x2, x1, y2, y1, rad2, rad1, color2, color1}; |
| sendString(circledata, sizeof(circledata)); |
| } else { |
| unsigned char circledata[] = {0xff, 0xCD, x2, x1, y2, y1, rad2, rad1, color2, color1}; |
| sendString(circledata, sizeof(circledata)); |
| } |
| } |
| |
| void drawLine(int8_t x1, int8_t y1, int8_t x2, int8_t y2, int16_t color) { |
| uint8_t color1 = (uint8_t)(color % 256); |
| uint8_t color2 = (uint8_t)(color >> 8); |
| |
| unsigned char linedata[] = {0xff, 0xD2, 0x00, x1, 0x00, y1, 0x00, x2, 0x00, y2, color2, color1}; |
| sendString(linedata, sizeof(linedata)); |
| } |
| |
| //######### DRIVE METHODS ############ |
| /** |
| * Drives the left motor forward with a defined speed. |
| * Uses PWM to set the defined speed. |
| * |
| @param speed the desired speed of the motor |
| **/ |
| void leftForward(unit8_t speed) { |
| PORTB &= ~(1 << 6); |
| |
| setPulseLeftB(0); |
| setPulseLeftA(speed); |
| } |
| |
| /** |
| * Drives the left motor backwards with a defined speed. |
| * Uses PWM to set the defined speed. |
| * |
| @param speed the desired speed of the motor |
| **/ |
| void leftBackwards(uint8_t speed) { |
| setPulseLeftA(0); |
| setPulseLeftB(speed); |
| } |
| |
| /** |
| * Drives the right motor backwards with a defined speed. |
| * Uses PWM to set the defined speed. |
| * |
| @param speed the desired speed of the motor |
| **/ |
| void rightBackwards(uint8_t speed) { |
| setPulseRightB(0); |
| setPulseRightA(speed); |
| } |
| |
| /** |
| * Drives the right motor forwards with a defined speed. |
| * Uses PWM to set the defined speed. |
| * |
| @param speed the desired speed of the motor |
| **/ |
| void rightForward(uint8_t speed) { |
| setPulseRightA(0); |
| setPulseRightB(speed); |
| } |
| |
| //######### USART ######### |
| /** Enables USART[0-1] with default values both |
| * the oled display and Bluetooth module |
| */ |
| void usartInit() { |
| //#### USART0 OLED DISPLAY |
| //Nollstället värden |
| UCSR0B = 0X00; |
| UCSR0C = 0X00; |
| |
| //Baud rate |
| UBRR0 = 6; |
| |
| //Enable transmitter, receiver |
| UCSR0B |= (1 << RXEN0) | (1 << TXEN0); |
| |
| //8-bits (011) |
| UCSR0C |= (1 << UCSZ00) | (1 << UCSZ01); |
| //UCSR0B &= ~(1 << UCSZ02); |
| //1 STOP BIT (0) |
| //UCSR0C &= ~(1 << USBS0); |
| |
| //#### USART1 BLUETOOTH MODULE |
| //Nollställer värden |
| UCSR1B = 0x00; |
| UCSR1C = 0x00; |
| |
| //9600bps, 8-bits, 1 stop bit, parity none |
| //Baud rate 9600 |
| UBRR1 = ((F_CPU / (BAUDE_RATE * 16UL)) - 1); |
| |
| //Enable transmitter, receiver |
| UCSR1B |= (1 << RXEN1) | (1 << TXEN1); |
| |
| //Enables receiver, transmitter interrupts |
| UCSR1B |= (1 << RXCIE1); |
| |
| //8-bits (011) |
| UCSR1C |= (1 << UCSZ00) | (1 << UCSZ01); |
| //UCSR1B &= ~(1 << UCSZ02); |
| |
| //1 stop bit (0) |
| //UCSR1C &= ~(1 << USBS1); |
| //Pairty none (00) |
| //UCSR1C &= ~(1 << UPM11); |
| //UCSR1C &= ~(1 << UPM10); |
| |
| } |
| |
| /** Returns the received data from USART buffert.*/ |
| char usartReceive(uint8_t channel){ |
| |
| switch(channel){ |
| case 0: |
| //Wait as long as no data in receiver buffer |
| while(!(UCSR0A & (1 << RXC0))); |
| |
| //Return data from buffer |
| return UDR0; |
| |
| case 1: |
| ////TODO has to be checked |
| |
| //Wait as long as no data in receiver buffer |
| while(!(UCSR1A & (1 << RXC1))); |
| |
| //Return data from buffer |
| return UDR1; |
| |
| default: |
| return '_'; |
| |
| } |
| |
| } |
| |
| /** Sends the data to the USART channel. */ |
| void usartTransmit(uint8_t channel, unsigned char data){ |
| |
| switch(channel){ |
| case 0: |
| //Wait as long as there is data in buffer |
| while(!(UCSR0A & (1 << UDRE0))); |
| |
| //Send data 0xC6 |
| UDR0 = data; |
| break; |
| |
| case 1: |
| //Wait as long as there is data in buffer |
| while(!(UCSR1A & (1 << UDRE1))); |
| |
| //Send data 0xCE |
| UDR1 = data; |
| break; |
| } |
| |
| } |
| |
| //##### TIMERS FOR PWM ##### |
| |
| /** Timer/counter for PWM*/ |
| void timerInit(){ |
| //###### TIMER 1, 3 ###### |
| //Control register A |
| //Compare output mode selected with COM3A1 |
| |
| //#### Motor left |
| //Clear OC3A on compare match |
| TCCR3A |= (1 << COM3A1); |
| |
| //Clear OC3B on compare match (1-0) |
| TCCR3A |= (1 << COM3B1); |
| |
| //OC3A-B is output |
| DDRB |= (1 << 6) | (1 << 7); |
| |
| //#### Motor right |
| //Clear OC1A on compare match |
| TCCR1A |= (1 << COM1A1); |
| |
| //Clear OC1B on compare match (1-0) |
| TCCR1A |= (1 << COM1B1); |
| |
| //O1A-B is output |
| DDRB |= (1 << 4) | (1 << 5); |
| |
| //Fast PWM with ICR3 (1-1-1-0) |
| //ICR3 is the top, at this value the timer will restart |
| TCCR3A |= (1 << WGM31); |
| TCCR3B |= (1 << WGM32) | (1 << WGM33); |
| |
| //Prescaler appropriate divison factor is used (1-0-1) |
| TCCR3B |= (1 << CS31) | (1 << CS30); |
| |
| //Fast PWM with ICR1 (1-1-1-0) |
| //ICR1 is the top, at this value the timer will restart |
| TCCR1A |= (1 << WGM11); |
| TCCR1B |= (1 << WGM12) | (1 << WGM13); |
| |
| //Prescaler appropriate divison factor is used (1-0-1) |
| TCCR1B |= (1 << CS11) | (1 << CS10); |
| |
| //Sets the eriod of the cycle for both timer 3 and 1 |
| ICR3 = 255; |
| ICR1 = 255; |
| |
| } |
| |
| /** Sets the pulse for forward speed of the left motor*/ |
| void setPulseLeftA(uint8_t pulse){ |
| //Output compare register OCR3A |
| OCR3A = pulse; |
| } |
| |
| /** Sets the pulse for backwards speed of the left motor*/ |
| void setPulseLeftB(uint8_t pulse){ |
| //Output compare register OCR3B |
| OCR3B = pulse; |
| } |
| |
| /** Sets the pulse for forward speed of the right motor*/ |
| void setPulseRightA(uint8_t pulse){ |
| //Output compare register OCR1A |
| OCR1A = pulse; |
| } |
| |
| /** Sets the pulse for backwards speed of the right motor*/ |
| void setPulseRightB(uint8_t pulse){ |
| //Output compare register OCR1B |
| OCR1B = pulse; |
| } |